Tool/software:
I am testing the motor drive evm board. With the help of Dhinesh, I am able to make it run: RE: MCF8329A: Not able to complete MPET testing, not be able to start the motor using knob
The motor runs pretty well, but there are couple issues.
1) the current is very higher than expected. I have another motor driver testing the same motor. The current is at least 20% lower.
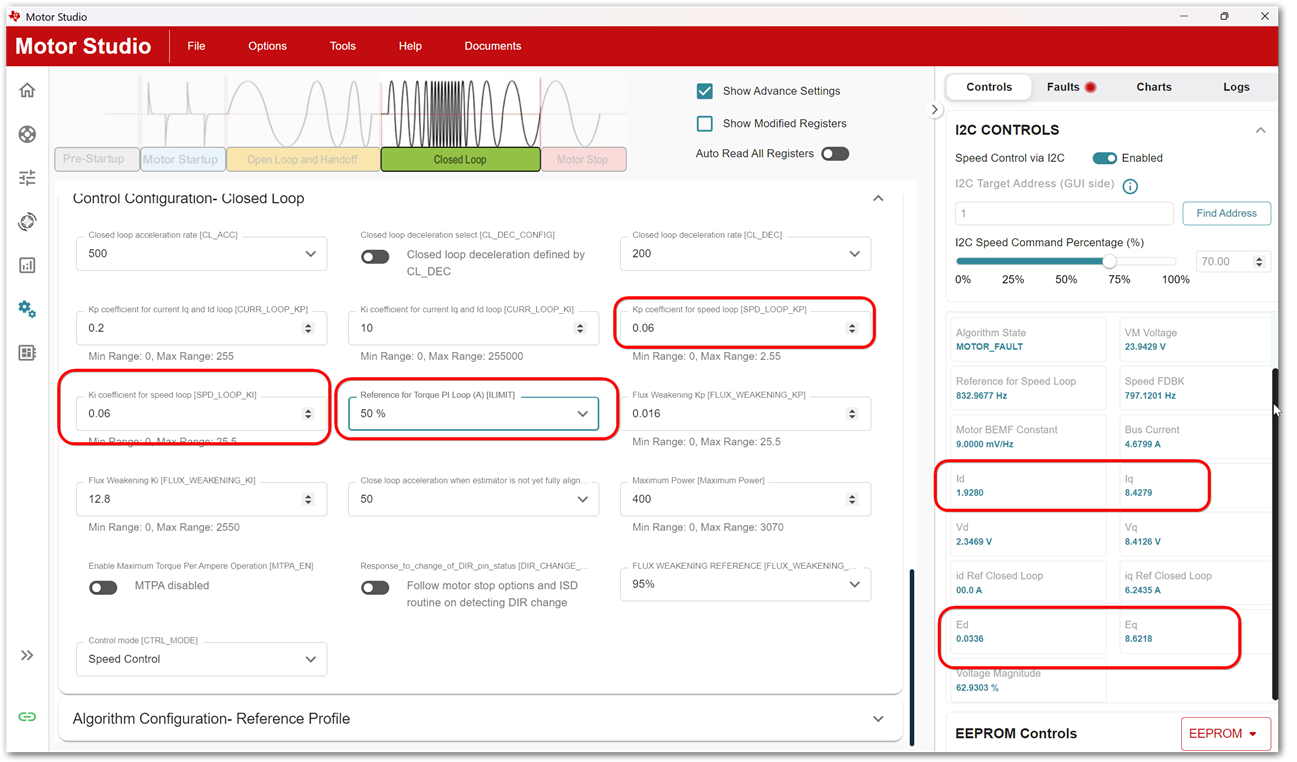
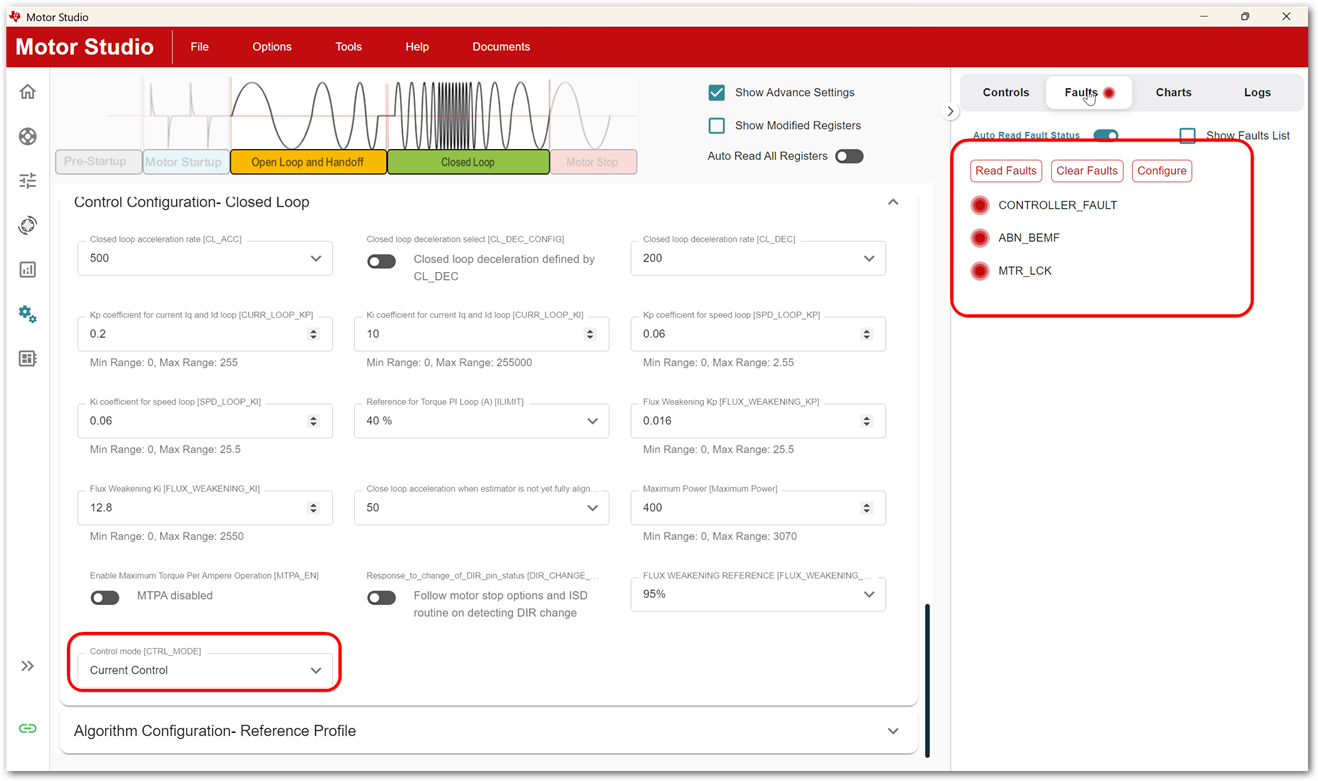
the Id is high. Sometime it is positive, sometime negative. Maybe the angle is not correctly set(according to chatgpt), but didn't find a way to adjust.
2) the nmos is very hot. I only use up to 4A to drive the motor. On another motor driver, the nmos is very cool at 4A current.
Certainly we can't simply compare this because nmos is different, but the big nmos shouldn't be this hot at 4A. If leave there for 1min, you finger can't touch it.
There must be a big room to improve.
This is what i did so far.
I measured the motor inductance and resistor with LCR meter, so the value shall be close enough.
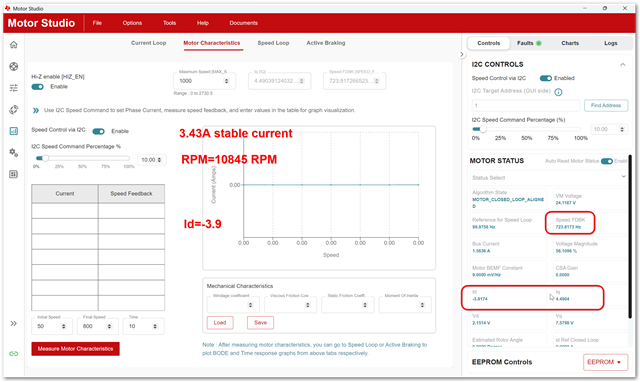
Then i use the motor studio to run Ke measurement at 300Hz (it failed at 1000Hz, but it works at 300Hz as the max).
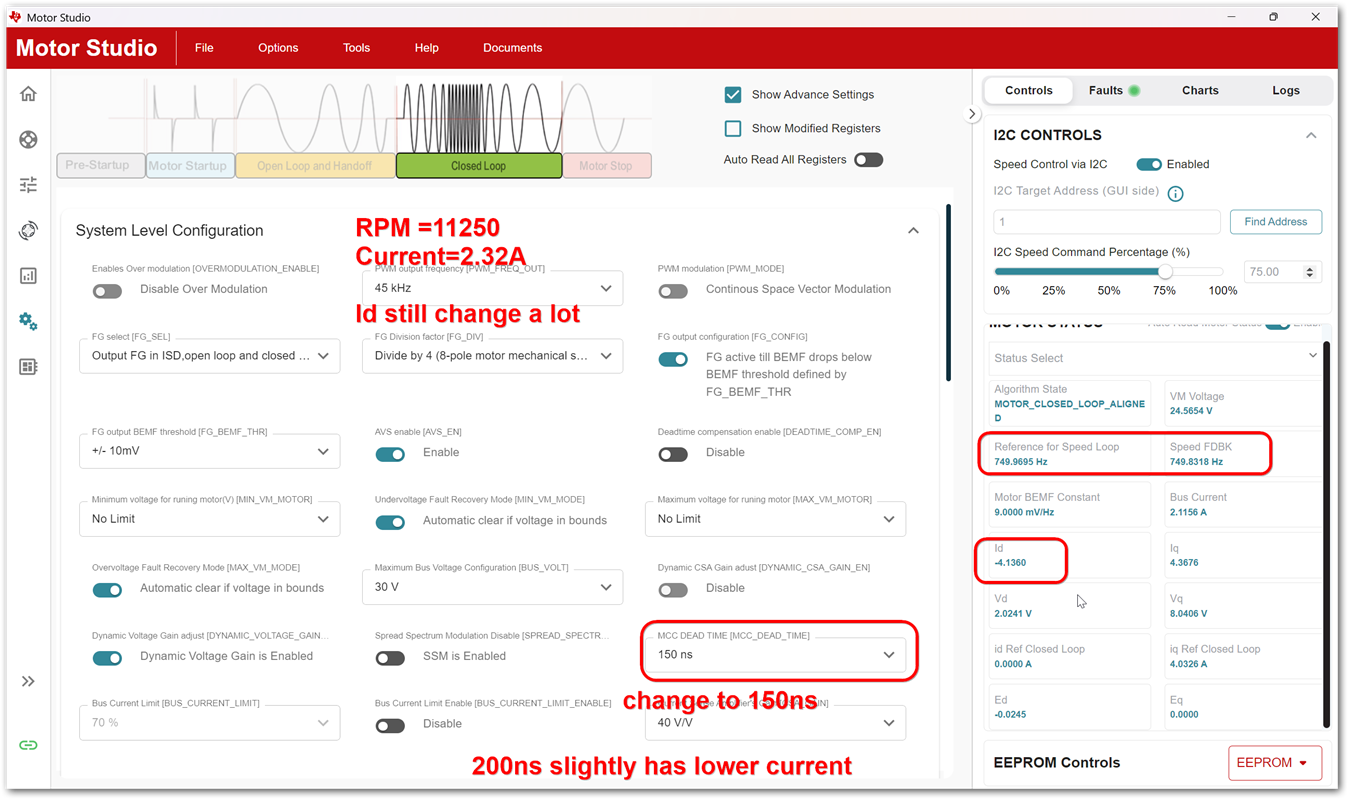
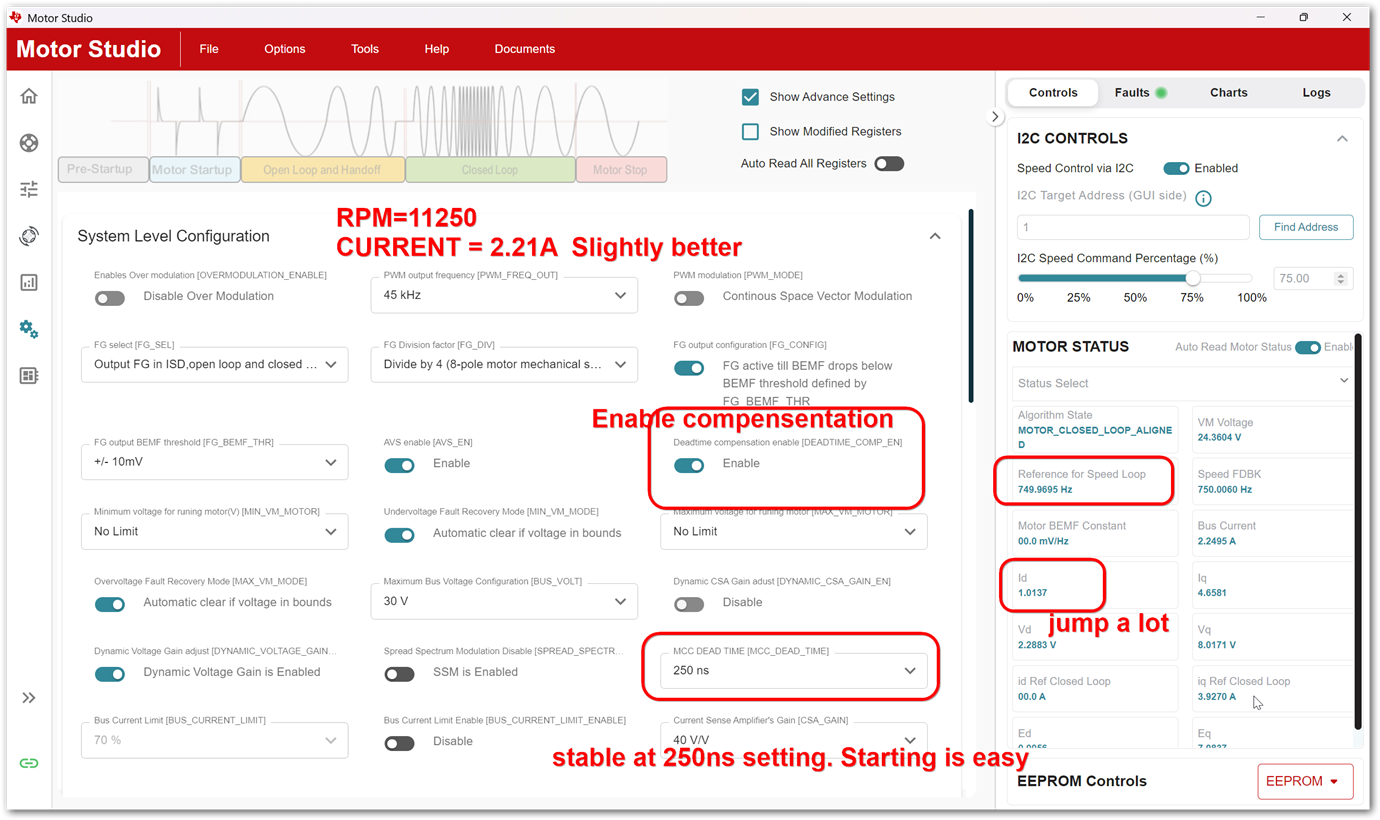
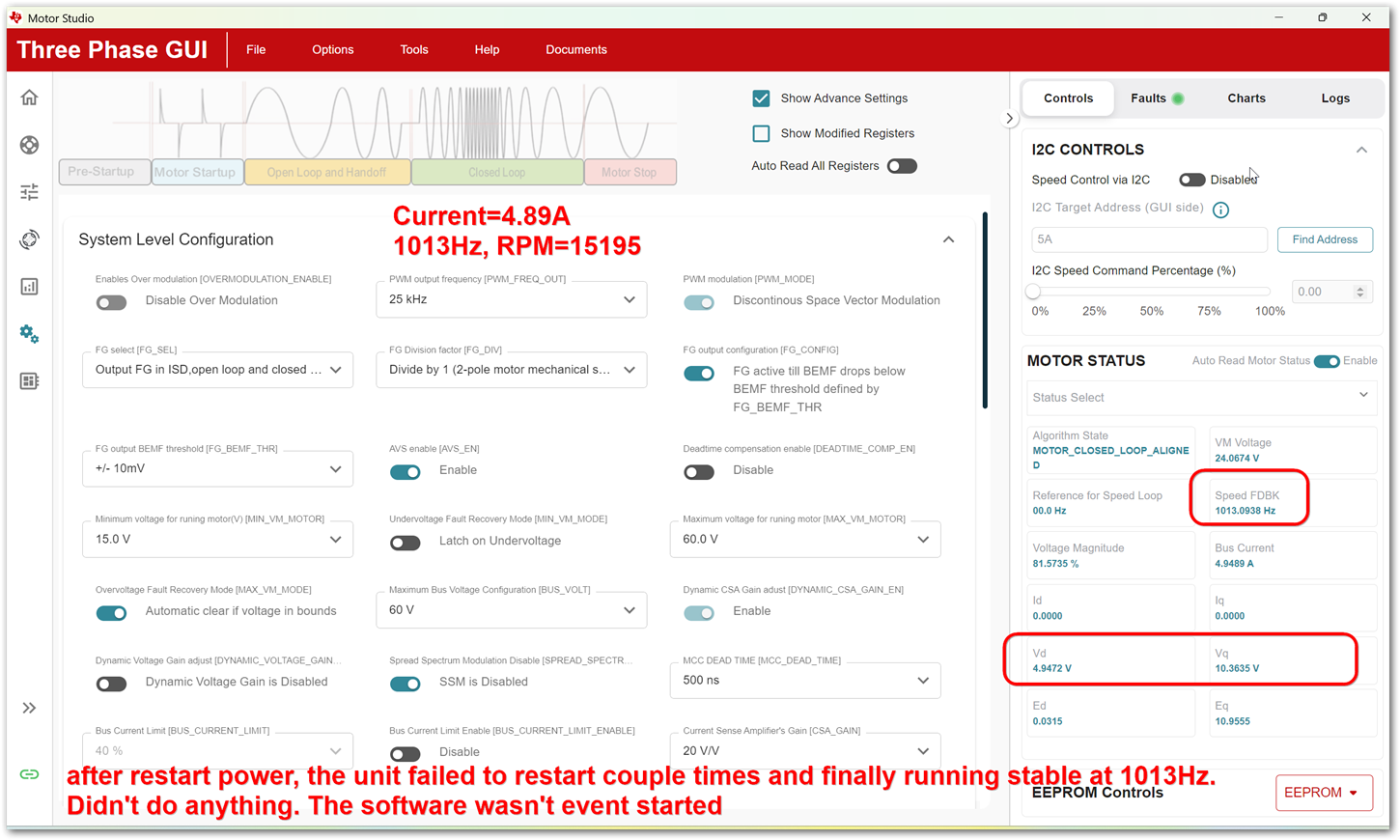
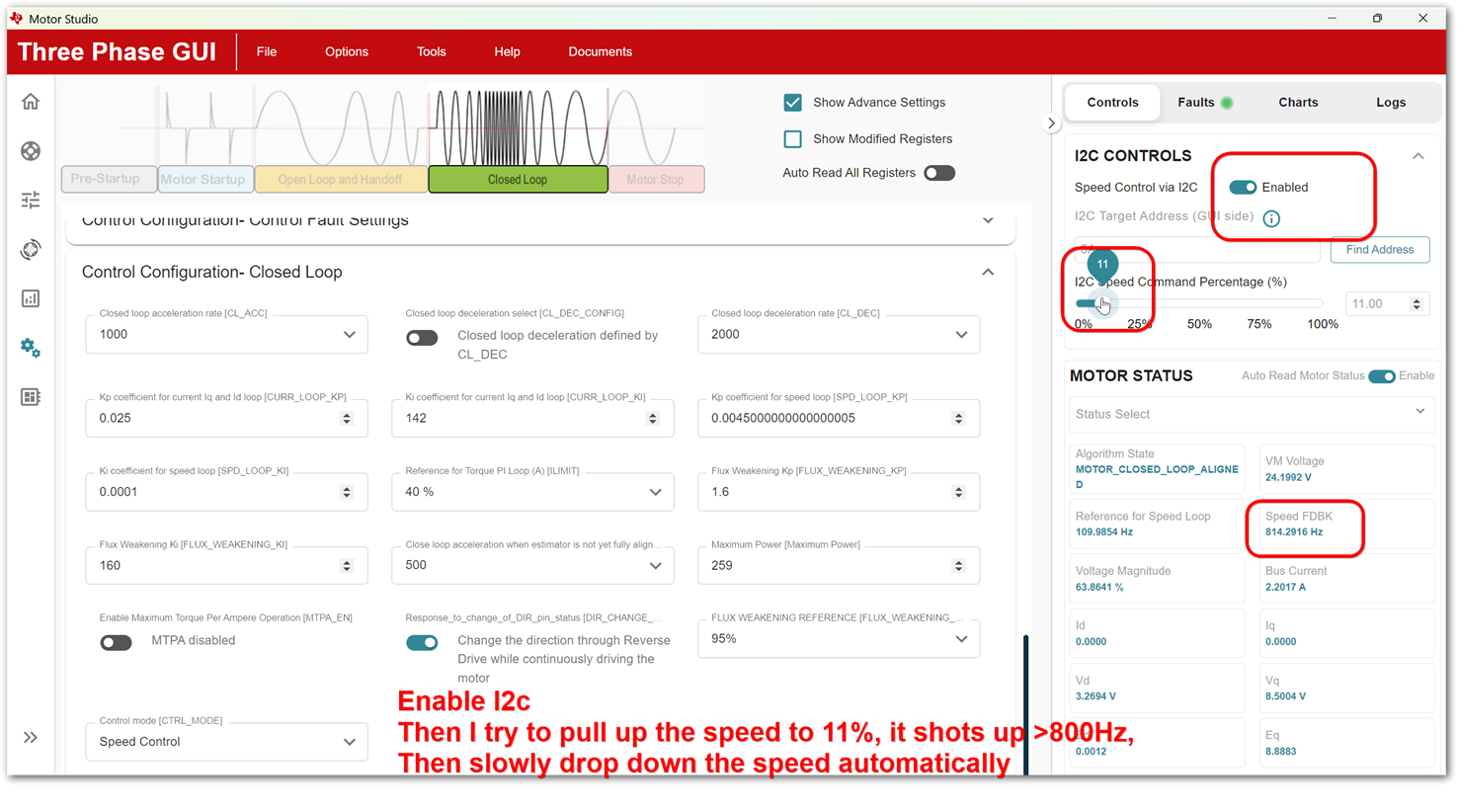
Then i switch to I2C speed control, I can run the motor at 11000rpm. The current from power supply is about 3.43A, The bus current shown in the figure is only 1.6A. Don't understand the exact meaning.
Id is very high.
I tune the BEMF value from 8-10 (measured by MPET is 9), there is no change of the total current, so BEMF value is not the issue.
Please help to instruct how to optimize