Other Parts Discussed in Thread: DRV8821, DRV8821EVM
Hi All,
Good Day.
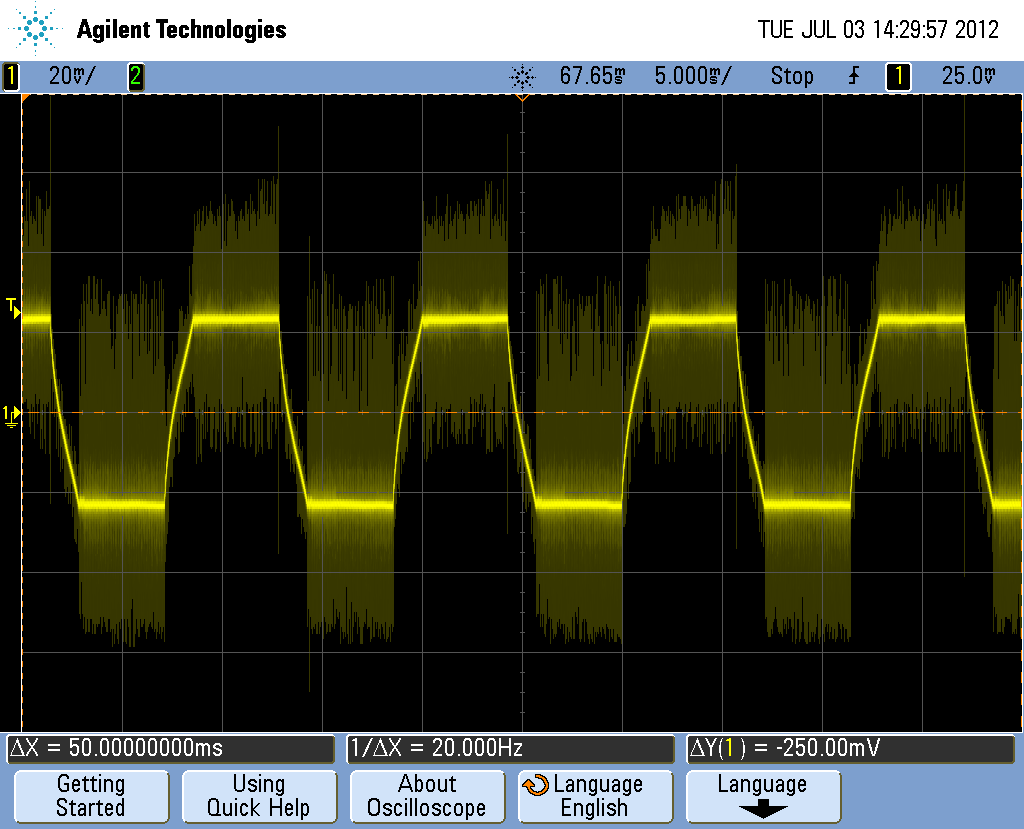
We designed a circuit which we can run two Double stack stepper motors using DRV8821. Without current limit for short duration we have not seen any noise on the current waveform. After that we chopped our circuit to 1.32A by adding 0.5Ohm resistor. But now my current waveform is having much high frequency noice. Can anyone suggest why it so??How to reduce it ?? Kindly help me out to get pure current waveform.
Regards,
Samson