


Hello fellow coengineers,
I am trying to get two stepper motors to run. In order to do so, I set up a circuit including DRV8824s which are being controlled by a microcontroller.
Once I send a given amount of pulses on the STEP line, the motor starts vibrating but does not turn. Hereby the length of the vibration is propotional to the amount of pulses sent on the STEP line, which makes me guess that it's a problem related to the commutation of the windings and/or power through them (and it's not just some random vibration).
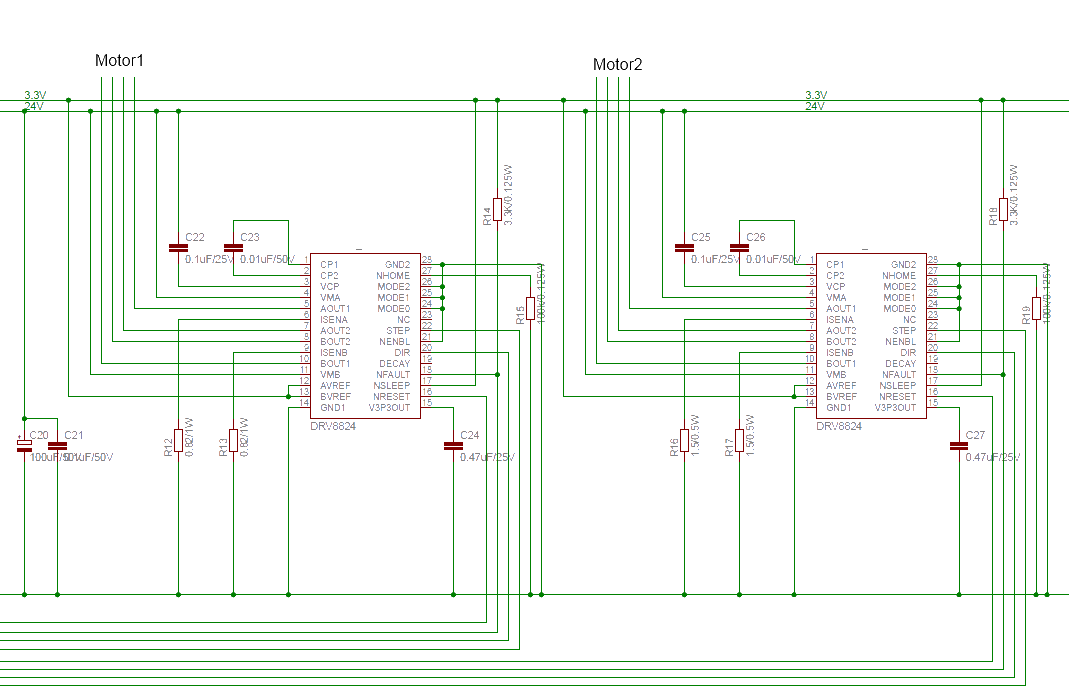
I have attached an excerpt of my board's schematic. The maximum current through the motor windings should be 0,85 and 0,45A, hence the 0,82 and 1,5Ohm on Isense.
The fact that both steppers act in the exact same manner makes me think that the problem does not lie in the motor itself, but rather in the controlling board. But I just can't figure out what might be wrong, therefore some help would be greatly appreciated.


{kind=link}