Hi,
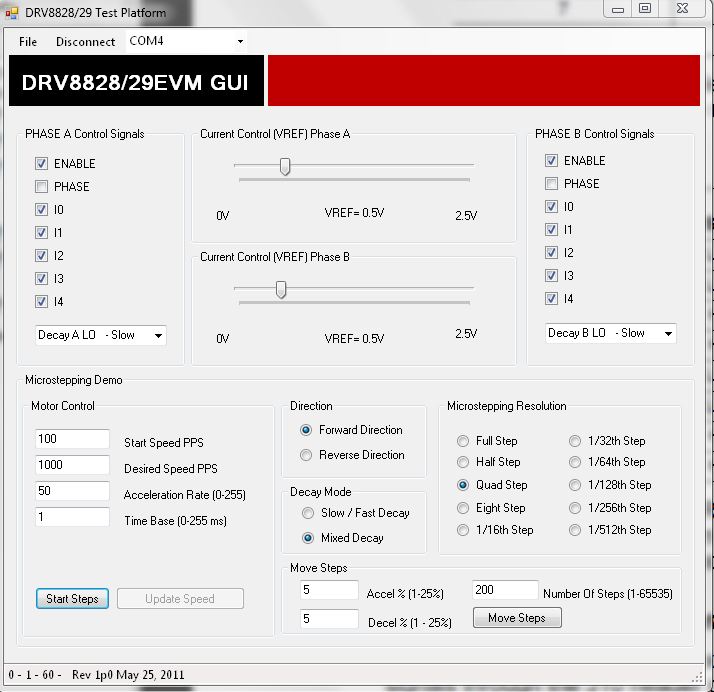
We are using TI DRV8828/29 evm for stepper motor control (datasheet attached, part number SST43D2100). I am trying to run this motor using TI GUI (CPG006_DRV88XX), but motor is not running smoothly and it is loading power supply. Please provide necessity help and clarify below points
- Phase button should be checked or unchecked in GUI.
- Enable button should be checked or unchecked in GUI.
- Are GUI parameters are motor dependent if yes then please tell how to select them?
We are using 24VDC, 1A (set current limit) power supply and connecting motor terminal A,A_bar and B,B_bar to evm.
regards
Vinod8741.SST43D2100.pdf