I have a problem with my DRV8818 after a reset and when I wake it up after sleep.
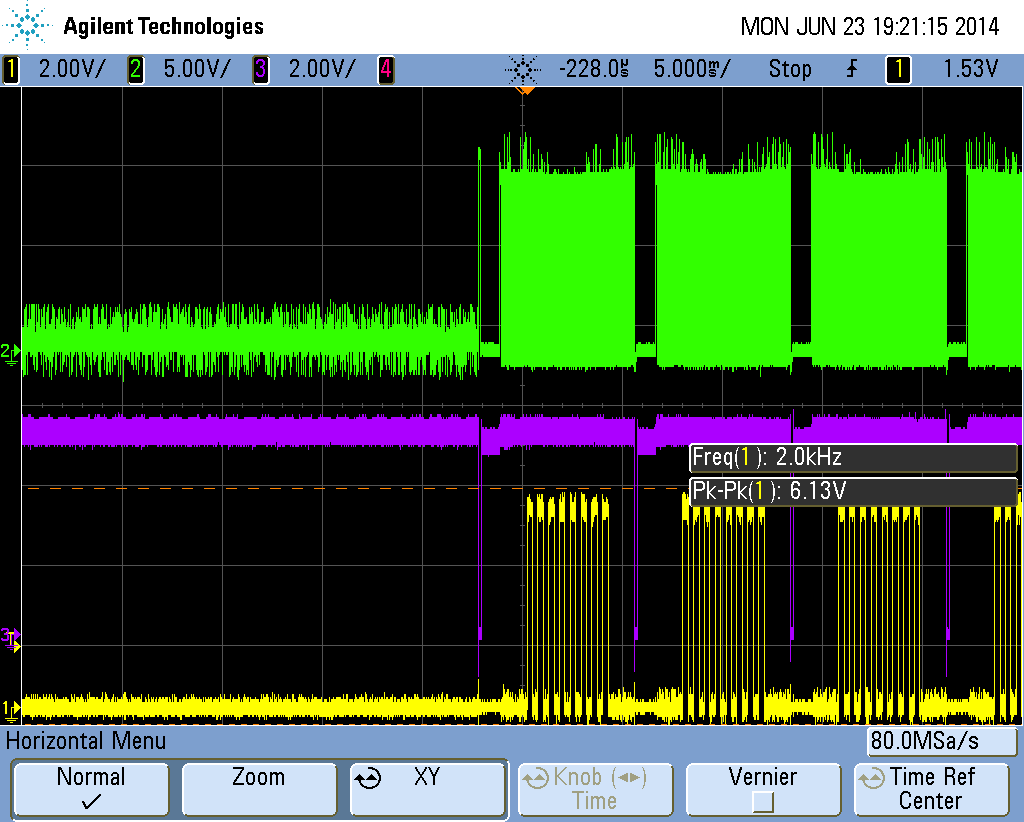
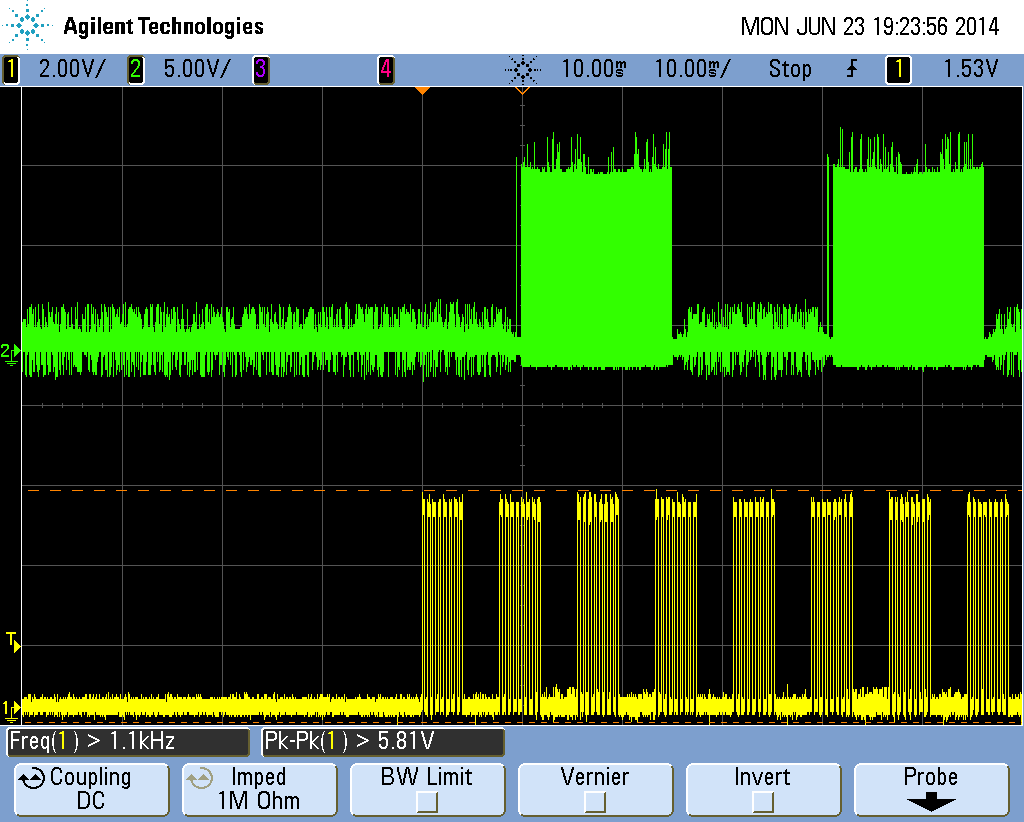
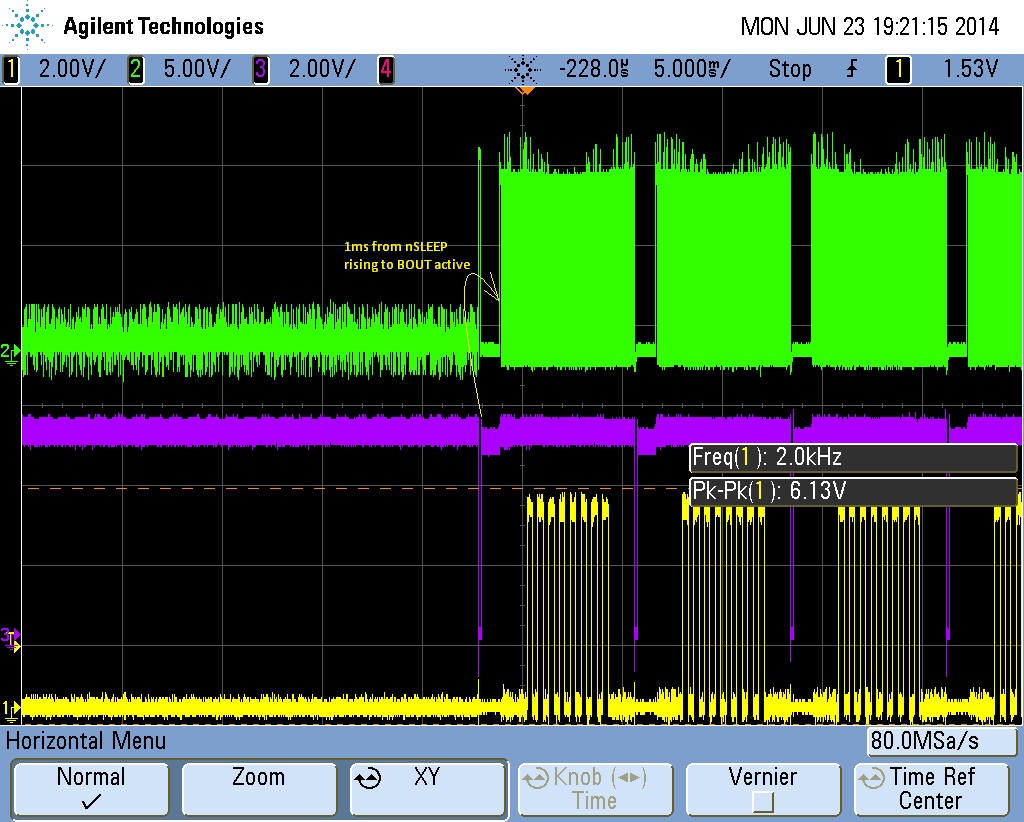
The first step dos not work. If I step it a number of times I have no problems in the following steps. The motor runs fine. But if I only make 1 step after a reset or after a wake up, the motor only makes a little noise and does not move. I have 500 microsecond between reset and the first step and I have 2 millisecond between wake up and the first step.
Anyone here that has any experience in this?