


Hi,
I'm working with the kit DRV8301-hc-c2 with a BLDC motor.
I would like to implement the switching scheme in Figure

When I apply this pattern, see state 0 (AH in pwm, BL in ON) ; you can see figure below ,
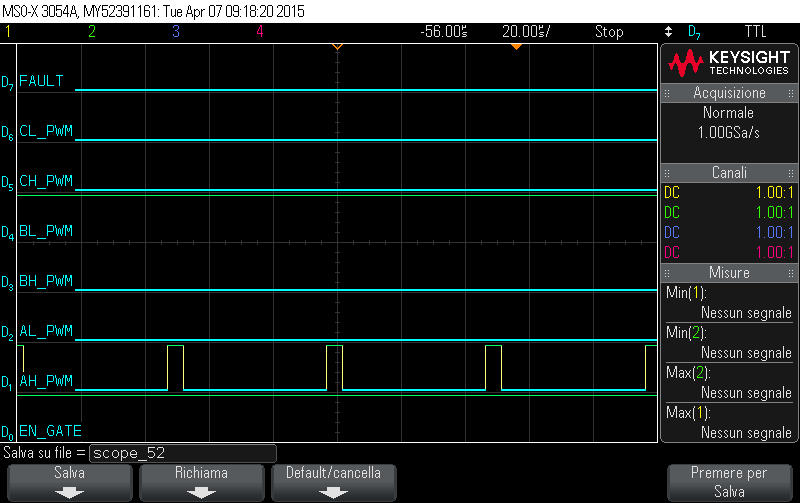
the device DRV8301 is always in fault.
Can I apply this switching scheme on the kit DRV8301 hc c2 without any fault ?
I attach these files :
- BLDC_int.c , see the level 1 , to find "pwm1.CmtnPointer = 0;" . then , I'm testing the state 0
- f2803xbldcpwm_BLDC.h , in BLDCPWM_MACRO(v) see only v.CmtnPointer = 0.
/* ==============================================================================
System Name: BLDC_Int
File Name: BLDC_Int.c
Description: Primary system file for the Real Implementation of Sensored
Trapeziodal Control of Brushless DC Motors (BLDC)
Originator: D3 Engineering (www.d3engineering.com)
Digital control systems Group - Texas Instruments
Note: In this software, the default inverter is supposed to be DRV8301/2-EVM.
=====================================================================================
History:
-------------------------------------------------------------------------------------
06-08-2011 Version 1.0: F2803x target
===================================================================================*/
// Include header files used in the main function
#include "PeripheralHeaderIncludes.h"
#include "BLDC_Int-Settings.h"
#include "IQmathLib.h"
#include "BLDC_Int.h"
#include <math.h>
#ifdef DRV8301
union DRV8301_STATUS_REG_1 DRV8301_stat_reg1;
union DRV8301_STATUS_REG_2 DRV8301_stat_reg2;
union DRV8301_CONTROL_REG_1 DRV8301_cntrl_reg1;
union DRV8301_CONTROL_REG_2 DRV8301_cntrl_reg2;
Uint16 read_drv_status = 0;
#endif
#ifdef FLASH
#pragma CODE_SECTION(MainISR,"ramfuncs");
void MemCopy();
void InitFlash();
#endif
// Prototype statements for functions found within this file.
interrupt void MainISR(void);
void DeviceInit();
// State Machine function prototypes
//------------------------------------
// Alpha states
void A0(void); //state A0
void B0(void); //state B0
void C0(void); //state C0
// A branch states
void A1(void); //state A1
void A2(void); //state A2
void A3(void); //state A3
// B branch states
void B1(void); //state B1
void B2(void); //state B2
void B3(void); //state B3
// C branch states
void C1(void); //state C1
void C2(void); //state C2
void C3(void); //state C3
// Variable declarations
void (*Alpha_State_Ptr)(void); // Base States pointer
void (*A_Task_Ptr)(void); // State pointer A branch
void (*B_Task_Ptr)(void); // State pointer B branch
void (*C_Task_Ptr)(void); // State pointer C branch
// Used for running BackGround in flash, and ISR in RAM
extern Uint16 *RamfuncsLoadStart, *RamfuncsLoadEnd, *RamfuncsRunStart;
int16 VTimer0[4]; // Virtual Timers slaved off CPU Timer 0 (A events)
int16 VTimer1[4]; // Virtual Timers slaved off CPU Timer 1 (B events)
int16 VTimer2[4]; // Virtual Timers slaved off CPU Timer 2 (C events)
int16 SerialCommsTimer;
// Global variables used in this system
float32 T = 0.001/ISR_FREQUENCY; // Samping period (sec), see parameter.h
Uint32 IsrTicker = 0;
Uint16 BackTicker = 0;
Uint16 PreviousState;
Uint32 VirtualTimer = 0;
Uint16 SpeedLoopFlag = FALSE;
Uint16 ILoopFlag = FALSE;
//_iq DfuncTesting = _IQ(0.3);
//_iq DfuncTesting = _IQ(0.1);
int16 DfuncTesting = (int16)_IQtoQ15(_IQ(0.1));//metto zero 0.5 � 50%
_iq IDCfdb;
//_iq DfuncTesting = _IQ(0.1);
//_iq DfuncStartup = _IQ(0.128);
//bici
//_iq DfuncStartup = _IQ(0.105);//a 10Khz
_iq DfuncStartup = _IQ(0.12);//a 20Khz
_iq CurrentStartup = _IQ(0.1);
_iq DcBusVolt = _IQ(0.0); //aggiunta bus voltage
_iq DcBusVoltage ;
Uint32 CmtnPeriodTarget = RAMP_END_RATE;
Uint32 CmtnPeriodSetpt = RAMP_START_RATE;
//Uint32 RampDelay = 1; //nema17
Uint32 RampDelay = 10;
_iq SpeedRef=_IQ(0.03);
#if defined(DRV8312)
_iq IRef = _IQ(0.1);
#endif
#if defined(DRV8301) || defined(DRV8302)
_iq IRef = _IQ(0.00);
_iq IRef_rc = _IQ(0.08);
#endif
int16 PwmDacCh1 = 0;
int16 PwmDacCh2 = 0;
int16 PwmDacCh3 = 0;
#if defined(DRV8301) || defined(DRV8302)
int16 PwmDacCh4 = 0;
#endif
int16 DlogCh1 = 0;
int16 DlogCh2 = 0;
int16 DlogCh3 = 0;
int16 DlogCh4 = 0;
//#if (BUILDLEVEL==LEVEL1)
//Uint16 DRV_RESET = 1;
//#else
Uint16 DRV_RESET = 0;
//#endif
volatile Uint16 EnableFlag = FALSE;
Uint16 RunMotor = FALSE;
//vecchi
//_iq BemfA_offset = _IQ(0.0065); //modify offset after calibration step
//_iq BemfB_offset = _IQ(0.0069); //modify offset after calibration step
//_iq BemfC_offset = _IQ(0.0060); //modify offset after calibration step
//_iq IDC_offset = _IQ(0.5017); //modify offset after calibration step
//bici
_iq BemfA_offset = _IQ(0.006484031677);//0.006560742855
_iq BemfB_offset = _IQ(0.006939411163); //modify offset after calibration step 0.0.006721198559
_iq BemfC_offset = _IQ(0.005781710148); //modify offset after calibration step 0.005826175213
_iq IDC_offset = _IQ(0.506891191); //modify offset after calibration step 0.506904304
_iq cal_filt_gain;
// Instance PID regulator to regulate the DC-bus current and speed
PID_GRANDO_CONTROLLER pid1_idc = {PID_TERM_DEFAULTS,PID_PARAM_DEFAULTS,PID_DATA_DEFAULTS};
PID_GRANDO_CONTROLLER pid1_spd = {PID_TERM_DEFAULTS,PID_PARAM_DEFAULTS,PID_DATA_DEFAULTS};
// Instance a PWM driver instance
//PWM_CNTL pwmcntl1 = PWM_CNTL_DEFAULTS;
PWMGEN pwm1 = PWMGEN_DEFAULTS;
// Instance a PWM DAC driver instance
PWMDAC pwmdac1 = PWMDAC_DEFAULTS;
// Instance a ramp controller to smoothly ramp the frequency
RMPCNTL rc1 = RMPCNTL_DEFAULTS;
// Instance a RAMP3 Module
RMP3 rmp3 = RMP3_DEFAULTS;
// Instance a MOD6 Module
MOD6CNTDIR mod_dir1 = MOD6CNTDIR_DEFAULTS;
// Instance a IMPULSE Module
IMPULSE impl1 = IMPULSE_DEFAULTS;
//Instance an InstaSPIN_BLDC Module
INSTASPIN_BLDC InstaSPIN_BLDC1 = INSTASPIN_BLDC_DEFAULTS;
// Instance a SPEED_PR Module
SPEED_MEAS_CAP speed1 = SPEED_MEAS_CAP_DEFAULTS;
// Create an instance of DATALOG Module
DLOG_4CH dlog = DLOG_4CH_DEFAULTS;
// Instance a Hall effect driver
HALL3 hall1 = HALL3_DEFAULTS;
Uint16 hallCommutateFlag = 0;
Uint16 HallState = 0;
//int16 HallOffset = 0;
int16 HallOffset = 0;
Uint16 SpeedLoopPrescaler = 10;
Uint16 SpeedLoopCount = 0;
_iq spd_pid_kp;
_iq spd_pid_ki;
_iq spd_pid_kd;
_iq cur_pid_kp;
_iq cur_pid_ki;
_iq cur_pid_kd;
void main(void)
{
DeviceInit(); // Device Life support & GPIO
// Only used if running from FLASH
// Note that the variable FLASH is defined by the compiler
#ifdef FLASH
// Copy time critical code and Flash setup code to RAM
// The RamfuncsLoadStart, RamfuncsLoadEnd, and RamfuncsRunStart
// symbols are created by the linker. Refer to the linker files.
MemCopy(&RamfuncsLoadStart, &RamfuncsLoadEnd, &RamfuncsRunStart);
// Call Flash Initialization to setup flash waitstates
// This function must reside in RAM
InitFlash(); // Call the flash wrapper init function
#endif //(FLASH)
// Timing sync for background loops - originali
// Timer period definitions found in device specific PeripheralHeaderIncludes.h
// CpuTimer1Regs.PRD.all = mSec1; // A tasks mSec1
// CpuTimer2Regs.PRD.all = mSec5; // B tasks
// Tasks State-machine init
Alpha_State_Ptr = &A0;
A_Task_Ptr = &A1;
B_Task_Ptr = &B1;
// Waiting for enable flag set
while (EnableFlag==FALSE)
{
BackTicker++;
}
// Initialize all the Device Peripherals:
// This function is found in DSP280x_CpuTimers.c
InitCpuTimers();
// Configure CPU-Timer 0 to interrupt every ISR Period:
// 60MHz CPU Freq, ISR Period (in uSeconds)
// This function is found in DSP280x_CpuTimers.c
ConfigCpuTimer(&CpuTimer0, SYSTEM_FREQUENCY, 1000/ISR_FREQUENCY);
StartCpuTimer0();
//aggiunta timer1 and 2
// Configure CPU-Timer 1,2 for background loops
ConfigCpuTimer(&CpuTimer1, 60, 15000);
ConfigCpuTimer(&CpuTimer2, 60, 50000);
StartCpuTimer1();
StartCpuTimer2();
#ifdef DRV8301
// Initialize SPI for communication to the DRV8301
DRV8301_SPI_Init(&SpibRegs);
#endif
// Reassign ISRs.
// Reassign the PIE vector for TINT0 to point to a different
// ISR then the shell routine found in DSP280x_DefaultIsr.c.
// This is done if the user does not want to use the shell ISR routine
// but instead wants to use their own ISR.
EALLOW; // This is needed to write to EALLOW protected registers
//PieVectTable.ADCINT1 = &MainISR;
PieVectTable.TINT0 = &MainISR;
EDIS; // This is needed to disable write to EALLOW protected registers
// Enable PIE group 1 interrupt 7 for ADCINT1
//PieCtrlRegs.PIEIER1.all = M_INT1;
PieCtrlRegs.PIEIER1.all = M_INT7;
// Enable CPU INT1 for ADCINT1:
IER |= M_INT1;
// Enable Global realtime interrupt DBGM
// Initialize the PWM control module
//pwmcntl1.PWMprd = SYSTEM_FREQUENCY*1000000*T/2;; // Set the pwm period for this example
//pwmcntl1.PWMprd = 0; //ponti aperti ?
//PWM_CNTL_INIT_MACRO(pwmcntl1);
//PWM_CNTL_MACRO(pwmcntl1);
// Initialize PWM module
pwm1.PeriodMax = (SYSTEM_FREQUENCY/PWM_FREQUENCY)*1000; // Asymmetric PWM
pwm1.DutyFunc = ALIGN_DUTY; // DutyFunc = Q15
BLDCPWM_INIT_MACRO(pwm1)
// Initialize PWMDAC module
pwmdac1.PeriodMax = 500; // 3000->10kHz, 1500->20kHz, 1000-> 30kHz, 500->60kHz
pwmdac1.PwmDacInPointer0 = &PwmDacCh1;
pwmdac1.PwmDacInPointer1 = &PwmDacCh2;
pwmdac1.PwmDacInPointer2 = &PwmDacCh3;
#if defined(DRV8301) || defined(DRV8302)
pwmdac1.PwmDacInPointer3 = &PwmDacCh4;
#endif
PWMDAC_INIT_MACRO(pwmdac1)
// Initialize Hall module
// The hall order is not set in the first revolution, like was done on the DRV8312-kit code.
// Part of bringing up the motor is finding the correct hall order and modifying the hall1.HallMap[]
hall1.DebounceAmount = 1;
hall1.Revolutions = -1;
hall1.HallMap[0] = 0;
hall1.HallMap[1] = 4;
hall1.HallMap[2] = 5;
hall1.HallMap[3] = 2;
hall1.HallMap[4] = 1;
hall1.HallMap[5] = 3;
HALL3_INIT_MACRO(hall1);
// This is used to offset the hall order
//HallOffset = 2; //nema17
HallOffset = 3;//bici su rullo - bici a vuoto 4
// Initialize DATALOG module
dlog.iptr1 = &DlogCh1;
dlog.iptr2 = &DlogCh2;
dlog.iptr3 = &DlogCh3;
dlog.iptr4 = &DlogCh4;
dlog.trig_value = 0x0;//0x1 default
dlog.size = 0x0C8; //200 campioni 0x0C8
#if (BUILDLEVEL < 5)
dlog.prescalar = 25;
#else
dlog.prescalar = 1;
#endif
dlog.init(&dlog);
// Initialize ADC module (F2803XIDC_VEMF.H)
ADC_MACRO_INIT()
// Initialize the SPEED_PR module
speed1.InputSelect = 0;
speed1.BaseRpm = 120*(BASE_FREQ/POLES); // Base RPM = 4999
speed1.SpeedScaler = (Uint32)(ISR_FREQUENCY/(6*BASE_FREQ*0.001)); // divider of 10
// Initialize RMPCNTL module
rc1.RampDelayMax = 1;//2
rc1.RampLowLimit = _IQ(-0.5);//-1.0 erano questi
rc1.RampHighLimit = _IQ(0.5);//+1.0
// Initialize RMP3 module
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
rmp3.Out = CmtnPeriodSetpt;
rmp3.Ramp3Min = CmtnPeriodTarget;
//Initialize the INSTASPIN_BLDC module
// not used in code
InstaSPIN_BLDC1.VaOffset = BemfA_offset; //modify offset after calibration step
InstaSPIN_BLDC1.VbOffset = BemfB_offset; //modify offset after calibration step
InstaSPIN_BLDC1.VcOffset = BemfC_offset; //modify offset after calibration step
InstaSPIN_BLDC1.Int_Threshold = _IQ(1.0);
// Initialize the PID_GRANDO_CONTROLLER module for dc-bus current
/*
cur_pid_kp = _IQ(0.25);
cur_pid_ki = _IQ(550.0);
cur_pid_kd = _IQ(0.0);
pid1_idc.param.Kp = cur_pid_kp;
pid1_idc.param.Kr = _IQ(1.0);
pid1_idc.param.Ki = _IQmpy(_IQ(T),cur_pid_ki);
pid1_idc.param.Kd = _IQdiv(cur_pid_kd,_IQ(T));
pid1_idc.param.Km = _IQ(1.0);
pid1_idc.param.Umax = _IQ(0.95);
pid1_idc.param.Umin = _IQ(-0.95);
*/
//dati bldc sensorless
//nota : i controllori Kp e ki della texas instruments funziona carico
//bisogna fare delle prove a carico
//dati di default controllore
// pid1_idc.param.Kp = _IQ(2*(T/0.001));
// pid1_idc.param.Ki = _IQ(T/0.001);
pid1_idc.param.Kp = _IQ(((2*PI)/(T*20))*LS*(BASE_CURRENT/BASE_VOLTAGE)); //dalla teoria di texas tuning pi 2*pi*0.25
pid1_idc.param.Ki = _IQ(((T*RS)/LS)); //dalla teoria di texas tuning pi
// pid1_idc.param.Kp = _IQ(((2*PI)/(T*20))*LS);
// pid1_idc.param.Ki = _IQ(T/0.0005);
// pid1_idc.param.Kp = _IQ(0.05);
pid1_idc.param.Kd = _IQ(0/T);
pid1_idc.param.Kr = _IQ(1.0);//1
pid1_idc.param.Km = _IQ(1.0);
pid1_idc.param.Umax = _IQ(0.95);//0.95
pid1_idc.param.Umin = _IQ(-0.95);//-0.95
// Initialize the PID_GRANDO_CONTROLLER module for dc-bus current
/* pid1_idc.param.Kp = _IQ(3.176*BASE_CURRENT/BASE_VOLTAGE);
pid1_idc.param.Kr = _IQ(1.0);
pid1_idc.param.Ki = _IQ(T/0.0005);
pid1_idc.param.Kd = _IQ(0/T);
pid1_idc.param.Km = _IQ(1.0);
pid1_idc.param.Umax = _IQ(0.95);
pid1_idc.param.Umin = _IQ(0.0);*/
// Initialize the PID_GRANDO_CONTROLLER module for Speed
//spd_pid_kp = _IQ(0.50); //default
spd_pid_kp = _IQ(0.05);
spd_pid_ki = _IQ(10.0); //default
//spd_pid_kp = _IQ(0.12089);
//spd_pid_ki = _IQ(0.75);
spd_pid_kd = _IQ(0.0);
pid1_spd.param.Kp = spd_pid_kp;
pid1_spd.param.Kr = _IQ(1.0);
pid1_spd.param.Ki = _IQmpy( _IQ(T * SpeedLoopPrescaler) , spd_pid_ki);
pid1_spd.param.Kd = _IQdiv(spd_pid_kd,_IQ(T*SpeedLoopPrescaler));
pid1_spd.param.Km = _IQ(1.0);
pid1_spd.param.Umax = _IQ(0.28); // limite sul duty
pid1_spd.param.Umin = _IQ(-0.28);
//pid1_spd.param.Kp = _IQ(0.2*BASE_FREQ/BASE_CURRENT/(POLES/2)); //Anaheim
//pid1_spd.param.Ki = _IQ(T*SpeedLoopPrescaler/0.3); //Anaheim
// Initialize the current offset calibration filter
cal_filt_gain = _IQ(T/(T+TC_CAL));
// Enable global Interrupts and higher priority real-time debug events:
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
// IDLE loop. Just sit and loop forever:
for(;;) //infinite loop
{
BackTicker++;
// State machine entry & exit point
//===========================================================
(*Alpha_State_Ptr)(); // jump to an Alpha state (A0,B0,...)
//===========================================================
#ifdef DRV8301
//read the status registers from the DRV8301
if(read_drv_status)
{
DRV8301_stat_reg1.all = DRV8301_SPI_Read(&SpibRegs,STAT_REG_1_ADDR);
DRV8301_stat_reg2.all = DRV8301_SPI_Read(&SpibRegs,STAT_REG_2_ADDR);
read_drv_status = 0;
}
#endif
}
} //END MAIN CODE
//=================================================================================
// STATE-MACHINE SEQUENCING AND SYNCRONIZATION FOR SLOW BACKGROUND TASKS
//=================================================================================
//--------------------------------- FRAMEWORK -------------------------------------
void A0(void)
{
// loop rate synchronizer for A-tasks
// if(CpuTimer0Regs.TCR.bit.TIF == 1) //orig
if(CpuTimer1Regs.TCR.bit.TIF == 1)
{
// CpuTimer0Regs.TCR.bit.TIF = 1; // clear flag-orig
CpuTimer1Regs.TCR.bit.TIF = 1; // clear flag
//-----------------------------------------------------------
(*A_Task_Ptr)(); // jump to an A Task (A1,A2,A3,...)
//-----------------------------------------------------------
VTimer0[0]++; // virtual timer 0, instance 0 (spare)
SerialCommsTimer++;
}
Alpha_State_Ptr = &B0; // Comment out to allow only A tasks
}
void B0(void)
{
// loop rate synchronizer for B-tasks
//if(CpuTimer1Regs.TCR.bit.TIF == 1)// orig
if(CpuTimer2Regs.TCR.bit.TIF == 1)
{
//CpuTimer1Regs.TCR.bit.TIF = 1; // clear flag orig
CpuTimer2Regs.TCR.bit.TIF = 1; // clear flag
//-----------------------------------------------------------
(*B_Task_Ptr)(); // jump to a B Task (B1,B2,B3,...)
//-----------------------------------------------------------
VTimer1[0]++; // virtual timer 1, instance 0 (spare)
}
Alpha_State_Ptr = &A0; // Allow C state tasks
}
//=================================================================================
// A - TASKS (executed in every 1 msec)
//=================================================================================
//--------------------------------------------------------
void A1(void) // SPARE (not used)
//--------------------------------------------------------
{
/*
pid1_spd.param.Kp = spd_pid_kp;
pid1_spd.param.Ki = _IQmpy( _IQ(T * SpeedLoopPrescaler) , spd_pid_ki);
pid1_spd.param.Kd = _IQdiv(spd_pid_kd,_IQ(T*SpeedLoopPrescaler));
*/
//capire se commentare
//pid1_idc.param.Kp = _IQ(((2*PI)/(T*20))*LS*(BASE_CURRENT/BASE_VOLTAGE)); //dalla teoria di texas tuning pi 2*pi*0.25
/*
pid1_idc.param.Kp = _IQ(0.125*(BASE_CURRENT/BASE_VOLTAGE));
pid1_idc.param.Ki = _IQ((T*RS)/LS); //dalla teoria di texas tuning pi
pid1_idc.param.Kd = _IQ(0/T);
*/
if (EnableFlag == FALSE)
{
#if defined (DRV8312)
PHASE_A_OFF;
PHASE_B_OFF;
PHASE_C_OFF;
#endif
#if defined(DRV8301) || defined(DRV8302)
//de-assert the DRV830x EN_GATE pin
GpioDataRegs.GPBCLEAR.bit.GPIO39 = 1;
#endif
RunMotor = FALSE;
EALLOW;
EPwm1Regs.TZFRC.bit.OST=1;
//GpioDataRegs.GPACLEAR.bit.GPIO1 = 1;
EPwm2Regs.TZFRC.bit.OST=1;
//GpioDataRegs.GPACLEAR.bit.GPIO3 = 1;
EPwm3Regs.TZFRC.bit.OST=1;
//GpioDataRegs.GPACLEAR.bit.GPIO5 = 1;
EDIS;
}
else if((EnableFlag == TRUE) && (RunMotor == FALSE))
{
#ifdef DRV8302
#if DRV_GAIN == 10
GpioDataRegs.GPACLEAR.bit.GPIO25 = 1; // GAIN = 10
#elif DRV_GAIN == 40
GpioDataRegs.GPASET.bit.GPIO25 = 1; // GAIN = 40
#else
#error Invalid GAIN setting for DRV8302!!
#endif
//GpioDataRegs.GPACLEAR.bit.GPIO24 = 1; // M_OC - cycle by cycle current limit
GpioDataRegs.GPASET.bit.GPIO24 = 1; // M_OC - fault on OC
#endif
//if we want the power stage active we need to enable the DRV830x
//and configure it.
if(DRV_RESET == 0)
{
#if defined(DRV8301) || defined(DRV8302)
//assert the DRV830x EN_GATE pin
GpioDataRegs.GPBSET.bit.GPIO39 = 1;
DELAY_US(50000); //delay to allow DRV830x supplies to ramp up
#ifdef DRV8301
DRV8301_cntrl_reg1.bit.GATE_CURRENT = 0; // full current 1.7A
// DRV8301_cntrl_reg1.bit.GATE_CURRENT = 1; // med current 0.7A
// DRV8301_cntrl_reg1.bit.GATE_CURRENT = 2; // min current 0.25A
DRV8301_cntrl_reg1.bit.GATE_RESET = 0; // Normal Mode
DRV8301_cntrl_reg1.bit.PWM_MODE = 0; // six independant PWMs
// DRV8301_cntrl_reg1.bit.OC_MODE = 0; // current limiting when OC detected
DRV8301_cntrl_reg1.bit.OC_MODE = 1; // latched OC shutdown
// DRV8301_cntrl_reg1.bit.OC_MODE = 2; // Report on OCTWn pin and SPI reg only, no shut-down
// DRV8301_cntrl_reg1.bit.OC_MODE = 3; // OC protection disabled
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 0; // OC @ Vds=0.060V
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 4; // OC @ Vds=0.097V
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 6; // OC @ Vds=0.123V
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 9; // OC @ Vds=0.175V
DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 15; // OC @ Vds=0.358V default
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 16; // OC @ Vds=0.403V
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 17; // OC @ Vds=0.454V
// DRV8301_cntrl_reg1.bit.OC_ADJ_SET = 18; // OC @ Vds=0.511V
DRV8301_cntrl_reg1.bit.Reserved = 0;
// DRV8301_cntrl_reg2.bit.OCTW_SET = 0; // report OT and OC
DRV8301_cntrl_reg2.bit.OCTW_SET = 1; // report OT only
#if DRV_GAIN == 10
DRV8301_cntrl_reg2.bit.GAIN = 0; // CS amplifier gain = 10
#elif DRV_GAIN == 20
DRV8301_cntrl_reg2.bit.GAIN = 1; // CS amplifier gain = 20
#elif DRV_GAIN == 40
DRV8301_cntrl_reg2.bit.GAIN = 2; // CS amplifier gain = 40
#elif DRV_GAIN == 80
DRV8301_cntrl_reg2.bit.GAIN = 3; // CS amplifier gain = 80
#endif
DRV8301_cntrl_reg2.bit.DC_CAL_CH1 = 0; // not in CS calibrate mode
DRV8301_cntrl_reg2.bit.DC_CAL_CH2 = 0; // not in CS calibrate mode
DRV8301_cntrl_reg2.bit.OC_TOFF = 0; // normal mode
DRV8301_cntrl_reg2.bit.Reserved = 0;
//write to DRV8301 control register 1, returns status register 1
DRV8301_stat_reg1.all = DRV8301_SPI_Write(&SpibRegs,CNTRL_REG_1_ADDR,DRV8301_cntrl_reg1.all);
//write to DRV8301 control register 2, returns status register 1
DRV8301_stat_reg1.all = DRV8301_SPI_Write(&SpibRegs,CNTRL_REG_2_ADDR,DRV8301_cntrl_reg2.all);
#endif
#endif
}
speed1.InputSelect = 0;
speed1.NewTimeStamp = 0;
speed1.OldTimeStamp = 0;
speed1.EventPeriod = 0;
speed1.Speed = 0;
VirtualTimer = 0;
rc1.EqualFlag = 0;
rc1.RampDelayCount = 0;
rc1.TargetValue = 0;
rc1.SetpointValue = 0; //aggiunta
if(DfuncTesting >= _IQ(0.0)) //era >
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
//rc1.SetpointValue = _IQmpy(DfuncStartup,mod_dir1.CntDirection);//tolta
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Out = CmtnPeriodSetpt;
rmp3.Ramp3DelayCount = 0;
rmp3.Ramp3DoneFlag = 0;
impl1.Counter = 0;
impl1.Out = 0;
mod_dir1.Counter = 0;
mod_dir1.TrigInput = 0;
//ILoopFlag = FALSE;// se lo commento con enable false posso riprendere il controllo di copia
SpeedLoopFlag = FALSE;
pid1_idc.data.d1 = 0;
pid1_idc.data.d2 = 0;
pid1_idc.data.i1 = 0;
pid1_idc.data.ud = 0;
pid1_idc.data.ui = 0;
pid1_idc.data.up = 0;
pid1_idc.data.v1 = 0;
pid1_idc.data.w1 = 0;
pid1_idc.term.Out = 0;
pid1_spd.data.d1 = 0;
pid1_spd.data.d2 = 0;
pid1_spd.data.i1 = 0;
pid1_spd.data.ud = 0;
pid1_spd.data.ui = 0;
pid1_spd.data.up = 0;
pid1_spd.data.v1 = 0;
pid1_spd.data.w1 = 0;
pid1_spd.term.Out = 0;
RunMotor = TRUE;
EALLOW;
EPwm1Regs.TZCLR.bit.OST=1;
//GpioDataRegs.GPASET.bit.GPIO1 = 1;
//GpioDataRegs.GPASET.bit.GPIO3 = 1;
//GpioDataRegs.GPASET.bit.GPIO5 = 1;
EPwm2Regs.TZCLR.bit.OST=1;
EPwm3Regs.TZCLR.bit.OST=1;
EDIS;
}
//-------------------
//the next time CpuTimer0 'counter' reaches Period value go to A2
A_Task_Ptr = &A2;
//-------------------
}
//-----------------------------------------------------------------
void A2(void) // SPARE (not used)
//-----------------------------------------------------------------
{
//-------------------
//the next time CpuTimer0 'counter' reaches Period value go to A3
//GpioDataRegs.GPBTOGGLE.bit.GPIO34 = 1;//toggle led rosso su scheda ctr
A_Task_Ptr = &A3;
//-------------------
}
//-----------------------------------------
void A3(void) // SPARE (not used)
//-----------------------------------------
{
//-----------------
//the next time CpuTimer0 'counter' reaches Period value go to A1
A_Task_Ptr = &A1;
//-----------------
}
//=================================================================================
// B - TASKS (executed in every 5 msec)
//=================================================================================
//----------------------------------- USER ----------------------------------------
//----------------------------------------
void B1(void) // Toggle GPIO-00
//----------------------------------------
{
GpioDataRegs.GPBTOGGLE.bit.GPIO34 = 1;
//-----------------
//the next time CpuTimer1 'counter' reaches Period value go to B2
B_Task_Ptr = &B2;
//-----------------
}
//----------------------------------------
void B2(void) // SPARE
//----------------------------------------
{
//-----------------
//the next time CpuTimer1 'counter' reaches Period value go to B3
B_Task_Ptr = &B3;
//-----------------
}
//----------------------------------------
void B3(void) // SPARE
//----------------------------------------
{
//-----------------
//the next time CpuTimer1 'counter' reaches Period value go to B1
B_Task_Ptr = &B1;
//-----------------
}
// ==============================================================================
// =============================== MAIN ISR =====================================
// ==============================================================================
interrupt void MainISR(void)
{
// Verifying the ISR
IsrTicker++;
if(RunMotor)
{
// =============================== LEVEL 1 ======================================
// Module check out (do not connect the motors)
// ==============================================================================
#if (BUILDLEVEL==LEVEL1)
_iq iqVaIn;
_iq iqVbIn;
_iq iqVcIn;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// ------------------------------------------------------------------------------
iqVaIn = _IQ15toIQ((AdcResult.ADCRESULT1<<3));
iqVbIn = _IQ15toIQ((AdcResult.ADCRESULT2<<3));
iqVcIn = _IQ15toIQ((AdcResult.ADCRESULT3<<3));
InstaSPIN_BLDC1.Vag = iqVaIn - InstaSPIN_BLDC1.VaOffset; // Adjust for offset of Va_in
InstaSPIN_BLDC1.Vbg = iqVbIn - InstaSPIN_BLDC1.VbOffset; // Adjust for offset of Vb_in
InstaSPIN_BLDC1.Vcg = iqVcIn - InstaSPIN_BLDC1.VcOffset; // Adjust for offset of Vc_in
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the RAMP Control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Mod 6 counter macro.
// ------------------------------------------------------------------------------
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
//pwmcntl1.State = (int16)mod_dir1.Counter;
//pwmcntl1.Duty = DfuncStartup;
//PWM_CNTL_MACRO(pwmcntl1)
//da qua
// pwm1.CmtnPointer = (int16)mod_dir1.Counter;
pwm1.CmtnPointer = 0;
pwm1.DutyFunc = DfuncTesting;
//pwm1.DutyFunc = 0;
BLDCPWM_MACRO(pwm1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWMDAC module
// ------------------------------------------------------------------------------
PwmDacCh1 = (int16)(mod_dir1.Counter * 4096.0L);
PwmDacCh2 = _IQtoQ15(InstaSPIN_BLDC1.Vag);
PwmDacCh3 = _IQtoQ15(InstaSPIN_BLDC1.Vbg);
#if defined(DRV8301) || defined(DRV8302)
PwmDacCh4 = _IQtoQ15(InstaSPIN_BLDC1.Vcg);
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh1 = (int16)mod_dir1.Counter;
DlogCh2 = _IQtoQ15(InstaSPIN_BLDC1.Vag);
DlogCh3 = _IQtoQ15(InstaSPIN_BLDC1.Vbg);
DlogCh4 = _IQtoQ15(InstaSPIN_BLDC1.Vcg);
#endif // (BUILDLEVEL==LEVEL1)
// =============================== LEVEL 2 ======================================
// Verify ADC, run the motor open loop
// ==============================================================================
#if (BUILDLEVEL==LEVEL2)
_iq iqVaIn;
_iq iqVbIn;
_iq iqVcIn;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// BEMF is not used in sensored project, residual from sensorless project
// ------------------------------------------------------------------------------
iqVaIn = _IQ15toIQ((AdcResult.ADCRESULT1<<3));
iqVbIn = _IQ15toIQ((AdcResult.ADCRESULT2<<3));
iqVcIn = _IQ15toIQ((AdcResult.ADCRESULT3<<3));
InstaSPIN_BLDC1.Vag = iqVaIn - InstaSPIN_BLDC1.VaOffset; // Adjust for offset of Va_in
InstaSPIN_BLDC1.Vbg = iqVbIn - InstaSPIN_BLDC1.VbOffset; // Adjust for offset of Vb_in
InstaSPIN_BLDC1.Vcg = iqVcIn - InstaSPIN_BLDC1.VcOffset; // Adjust for offset of Vc_in
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the Ramp control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Modulo 6 counter macro.
// ------------------------------------------------------------------------------
if(DfuncStartup > _IQ(0.0))
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
pwmcntl1.State = (int16)mod_dir1.Counter;
pwmcntl1.Duty = DfuncStartup;
PWM_CNTL_MACRO(pwmcntl1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWMDAC module
// ------------------------------------------------------------------------------
PwmDacCh1 = (int16)(mod_dir1.Counter * 4096.0L);
PwmDacCh2 = _IQtoQ15(InstaSPIN_BLDC1.Vag);
PwmDacCh3 = _IQtoQ15(InstaSPIN_BLDC1.Vbg);
#if defined(DRV8301) || defined(DRV8302)
PwmDacCh4 = _IQtoQ15(InstaSPIN_BLDC1.Vcg);
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh1 = (int16)mod_dir1.Counter;
DlogCh2 = _IQtoQ15(InstaSPIN_BLDC1.Vag);
DlogCh3 = _IQtoQ15(InstaSPIN_BLDC1.Vbg);
DlogCh4 = _IQtoQ15(InstaSPIN_BLDC1.Vcg);
#endif // (BUILDLEVEL==LEVEL2)
// =============================== LEVEL 3 ======================================
// Auto-calibrate the current sensor and BEMF sense offsets
// Only the current matters for the sensored project
// ==============================================================================
#if (BUILDLEVEL==LEVEL3)
_iq IDCfdbk;
_iq VsenseA;
_iq VsenseB;
_iq VsenseC;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// ------------------------------------------------------------------------------
VsenseA = _IQ15toIQ((AdcResult.ADCRESULT1<<3))-BemfA_offset;
VsenseB = _IQ15toIQ((AdcResult.ADCRESULT2<<3))-BemfB_offset;
VsenseC = _IQ15toIQ((AdcResult.ADCRESULT3<<3))-BemfC_offset;
IDCfdbk=(_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1;
// ------------------------------------------------------------------------------
// LPF to average the calibration offsets
// Use the offsets calculated here to initialize BemfA_offset, BemfB_offset
// and BemfC_offset so that they are used for the remaining build levels
// ------------------------------------------------------------------------------
BemfA_offset = _IQmpy(cal_filt_gain,VsenseA) + BemfA_offset;
BemfB_offset = _IQmpy(cal_filt_gain,VsenseB) + BemfB_offset;
BemfC_offset = _IQmpy(cal_filt_gain,VsenseC) + BemfC_offset;
IDC_offset = _IQmpy(cal_filt_gain,IDCfdbk) + IDC_offset;
// ------------------------------------------------------------------------------
// force all PWMs to 0% duty cycle
// ------------------------------------------------------------------------------
EPwm1Regs.CMPA.half.CMPA=0; // PWM 1A - PhaseA
EPwm2Regs.CMPA.half.CMPA=0; // PWM 2A - PhaseB
EPwm3Regs.CMPA.half.CMPA=0; // PWM 3A - PhaseC
#endif // (BUILDLEVEL==LEVEL3)
// =============================== LEVEL 4 ======================================
// This build level will test the hall effect sensors.
// The order that the sensors is fired must me manually changed. After the
// "firing order" of the hall sensors is configured, pull hallCommutateFlag
// to commutate the motor using hall sensors.
// The speed module is also tested in the build level
// ==============================================================================
#if (BUILDLEVEL==LEVEL4)
//aggiunta
_iq iqVaIn;
_iq iqVbIn;
_iq iqVcIn;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// BEMF is not used in sensored project, residual from sensorless project
// ------------------------------------------------------------------------------
iqVaIn = _IQ15toIQ((AdcResult.ADCRESULT1<<3));
iqVbIn = _IQ15toIQ((AdcResult.ADCRESULT2<<3));
iqVcIn = _IQ15toIQ((AdcResult.ADCRESULT3<<3));
iqVaIn = iqVaIn - BemfA_offset ; // Adjust for offset of Va_in
iqVbIn = iqVbIn - BemfB_offset ; // Adjust for offset of Vb_in
iqVcIn = iqVcIn - BemfC_offset ; // Adjust for offset of Vc_in
_iq IDCfdbk;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// ------------------------------------------------------------------------------
#if defined(DRV8301) || defined(DRV8302)
IDCfdbk=-((_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1);
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the Ramp control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the HALL module and call the Hall sensor read macro.
// ------------------------------------------------------------------------------
HALL3_READ_MACRO(hall1)
HallState = (hall1.HallMap[hall1.HallGpioAccepted - 1] + HallOffset +6)%6;
// ------------------------------------------------------------------------------
// Connect inputs of the SPEED_PR module and call the speed calculation macro.
// ------------------------------------------------------------------------------
if (hall1.CmtnTrigHall==0x7FFF)
{
speed1.TimeStamp = VirtualTimer;
SPEED_PR_MACRO(speed1);
}
PreviousState = HallState;
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Modulo 6 counter macro.
// ------------------------------------------------------------------------------
if(DfuncStartup > _IQ(0.0))
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
if( hallCommutateFlag == TRUE){
pwmcntl1.State = HallState;
}else{
pwmcntl1.State = (int16)mod_dir1.Counter;
}
pwmcntl1.Duty = DfuncStartup;
PWM_CNTL_MACRO(pwmcntl1)
// ------------------------------------------------------------------------------
// Connect inputs of the PWMDAC module
// ------------------------------------------------------------------------------
PwmDacCh1 = _IQtoQ15(iqVaIn);//non va
PwmDacCh2 = _IQtoQ15(iqVbIn);
PwmDacCh3 = _IQtoQ15(iqVcIn);
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh2 = (int16)mod_dir1.Counter;
// DlogCh2 = (int16)HallState;
// DlogCh3 = (int16)hall1.HallGpioAccepted;
// DlogCh4 = (int16)1;
DlogCh1 = _IQtoQ15(iqVaIn);
DlogCh3 = _IQtoQ15(iqVbIn);
DlogCh4 = _IQtoQ15(iqVcIn);
#endif // (BUILDLEVEL==LEVEL4)
// =============================== LEVEL 5 ======================================
// Current loop is closed - NON FUNZIONA BENE
// ==============================================================================
#if (BUILDLEVEL==LEVEL5)
//--------originale
_iq IDCfdbk;
// IDCfdb = (_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1;
DcBusVolt = _IQ15toIQ((AdcResult.ADCRESULT5<<3)); // DC Bus voltage meas.
DcBusVoltage = BASE_VOLTAGE*DcBusVolt;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// ------------------------------------------------------------------------------
#if defined(DRV8301) || defined(DRV8302)
IDCfdbk=-((_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1);//rimettere segno meno
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the Ramp control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the HALL module and call the Hall sensor read macro.
// ------------------------------------------------------------------------------
HALL3_READ_MACRO(hall1)
HallState = (hall1.HallMap[hall1.HallGpioAccepted - 1] + HallOffset +6)%6;
// ------------------------------------------------------------------------------
// Connect inputs of the SPEED_PR module and call the speed calculation macro.
// ------------------------------------------------------------------------------
if (hall1.CmtnTrigHall==0x7FFF)
{
speed1.TimeStamp = VirtualTimer;
SPEED_PR_MACRO(speed1);
}
PreviousState = HallState;
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Modulo 6 counter macro.
// ------------------------------------------------------------------------------
if(DfuncStartup > _IQ(0.0))
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PID_REG3 module and call the PID current controller
// macro.
// ------------------------------------------------------------------------------
//varia il riferimento come una rampa
if (ILoopFlag == TRUE)
{
//pid1_idc.data.ui = 0;
//pid1_idc.data.i1 = 0;
rc1.TargetValue = IRef_rc;
RC_MACRO(rc1);
pid1_idc.term.Ref = rc1.SetpointValue;
}
//pid1_idc.term.Ref = IRef;//serve per variazione istantanea cio� in assenza di una rampa
pid1_idc.term.Fbk = _IQmpy(IDCfdbk,mod_dir1.CntDirection);
PID_GR_MACRO(pid1_idc)
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
//commutazione automatica
if (rmp3.Ramp3DoneFlag == 0x7FFFFFFF)
hallCommutateFlag = TRUE;
if( hallCommutateFlag == TRUE){
pwmcntl1.State = HallState;
}else{
pwmcntl1.State = (int16)mod_dir1.Counter;
}
if (ILoopFlag == FALSE) {
pwmcntl1.Duty = DfuncStartup;
pid1_idc.data.ui = 0;
pid1_idc.data.i1 = 0;
}
// else if (ILoopFlag == TRUE && IRef == 0 )
// pwmcntl1.Duty = 0; //sicurezza
else
pwmcntl1.Duty = pid1_idc.term.Out; //ctr of current
PWM_CNTL_MACRO(pwmcntl1)
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh1 = _IQtoQ15(pwmcntl1.Duty);
DlogCh2 = _IQtoQ15(IDCfdbk);
DlogCh3 = _IQtoQ15(DcBusVoltage);
DlogCh4 = (int16)HallState;
#endif // (BUILDLEVEL==LEVEL5)
// =============================== LEVEL 6 ======================================
// This closes the a speed loop and outputs a duty cycle. No current sense is
// used.
// ==============================================================================
#if (BUILDLEVEL==LEVEL6)
_iq IDCfdbk;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// Not used, reading is taken for debugging
// ------------------------------------------------------------------------------
#if defined(DRV8301) || defined(DRV8302)
IDCfdbk=-((_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1);
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the Ramp control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the HALL module and call the Hall sensor read macro.
// ------------------------------------------------------------------------------
HALL3_READ_MACRO(hall1)
HallState = (hall1.HallMap[hall1.HallGpioAccepted - 1] + HallOffset +6)%6;
// ------------------------------------------------------------------------------
// Connect inputs of the SPEED_PR module and call the speed calculation macro.
// ------------------------------------------------------------------------------
if (hall1.CmtnTrigHall==0x7FFF)
{
speed1.TimeStamp = VirtualTimer;
SPEED_PR_MACRO(speed1);
}
PreviousState = HallState;
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Modulo 6 counter macro.
// ------------------------------------------------------------------------------
if(DfuncStartup > _IQ(0.0))
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PID_REG3 module and call the PID speed controller
// macro.
// ------------------------------------------------------------------------------
if ( hallCommutateFlag == TRUE && (SpeedLoopCount >= SpeedLoopPrescaler) ){
pid1_spd.term.Ref = SpeedRef;
pid1_spd.term.Fbk = speed1.Speed;
PID_GR_MACRO(pid1_spd)
SpeedLoopCount = 1;
}else {
SpeedLoopCount++;
}
if ( hallCommutateFlag == FALSE){
pid1_spd.data.ui = 0;
pid1_spd.data.i1 = 0;
SpeedLoopCount = 1;
}
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
if( hallCommutateFlag == TRUE )
{
pwmcntl1.State = HallState;
//pwmcntl1.Duty = pid1_spd.term.Out;
//commento tutto perch� � la parte di un flag
if ( SpeedLoopFlag == TRUE )
pwmcntl1.Duty = pid1_spd.term.Out; // controlled Speed duty-cycle
else
{
pwmcntl1.Duty = DfuncStartup;
pid1_spd.data.ui = 0; // lasciare o no?
pid1_spd.data.i1 = 0; //
}
}
else
{
pwmcntl1.State = (int16)mod_dir1.Counter;
pwmcntl1.Duty = DfuncStartup;
}
PWM_CNTL_MACRO(pwmcntl1)
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh1 = (int16)SpeedRef;
DlogCh2 = (int16)speed1.Speed;
DlogCh3 = (int16)mod_dir1.Counter;
DlogCh4 = _IQtoQ15(IDCfdbk);
#endif // (BUILDLEVEL==LEVEL6)
// =============================== LEVEL 7 ======================================
// Verify the closed speed loop and speed PI controller
// ==============================================================================
#if (BUILDLEVEL==LEVEL7)
_iq IDCfdbk;
// ------------------------------------------------------------------------------
// ADC conversion and offset adjustment
// Not used, reading is taken for debugging
// ------------------------------------------------------------------------------
#if defined(DRV8301) || defined(DRV8302)
IDCfdbk=-((_IQ15toIQ(AdcResult.ADCRESULT4<<3)-IDC_offset)<<1);
#endif
// ------------------------------------------------------------------------------
// Connect inputs of the RMP3 module and call the Ramp control 3 macro.
// ------------------------------------------------------------------------------
rmp3.DesiredInput = CmtnPeriodTarget;
rmp3.Ramp3Delay = RampDelay;
RC3_MACRO(rmp3)
// ------------------------------------------------------------------------------
// Connect inputs of the IMPULSE module and call the Impulse macro.
// ------------------------------------------------------------------------------
impl1.Period = rmp3.Out;
IMPULSE_MACRO(impl1)
// ------------------------------------------------------------------------------
// Connect inputs of the HALL module and call the Hall sensor read macro.
// ------------------------------------------------------------------------------
HALL3_READ_MACRO(hall1);
HallState = (hall1.HallMap[hall1.HallGpioAccepted - 1] + HallOffset +6)%6;
// ------------------------------------------------------------------------------
// Connect inputs of the SPEED_PR module and call the speed calculation macro.
// ------------------------------------------------------------------------------
if (hall1.CmtnTrigHall==0x7FFF)
{
speed1.TimeStamp = VirtualTimer;
SPEED_PR_MACRO(speed1);
}
PreviousState = HallState;
// ------------------------------------------------------------------------------
// Connect inputs of the MOD6 module and call the Modulo 6 counter macro.
// ------------------------------------------------------------------------------
if(DfuncStartup > _IQ(0.0))
{
mod_dir1.CntDirection = _IQ(1.0);
}
else
{
mod_dir1.CntDirection = _IQ(-1.0);
}
mod_dir1.TrigInput = impl1.Out;
MOD6CNTDIR_MACRO(mod_dir1)
// ------------------------------------------------------------------------------
// Connect inputs of the PID_REG3 module and call the PID speed controller
// macro.
// ------------------------------------------------------------------------------
if ( hallCommutateFlag == TRUE && (SpeedLoopCount >= SpeedLoopPrescaler) ){
pid1_spd.term.Ref = SpeedRef;
pid1_spd.term.Fbk = speed1.Speed;
PID_GR_MACRO(pid1_spd)
SpeedLoopCount = 1;
}else {
SpeedLoopCount++;
}
if ( hallCommutateFlag == FALSE){
pid1_spd.data.ui = 0;
pid1_spd.data.i1 = 0;
SpeedLoopCount = 1;
}
// ------------------------------------------------------------------------------
// Connect inputs of the PID_REG3 module and call the PID current controller
// macro.
// ------------------------------------------------------------------------------
pid1_idc.term.Ref = pid1_spd.term.Out;
pid1_idc.term.Fbk = IDCfdbk;
PID_GR_MACRO(pid1_idc)
// ------------------------------------------------------------------------------
// Connect inputs of the PWM_DRV module and call the PWM signal generation
// update macro.
// ------------------------------------------------------------------------------
if( hallCommutateFlag == TRUE){
pwmcntl1.State = HallState;
pwmcntl1.Duty = pid1_idc.term.Out;
}else{
pwmcntl1.State = (int16)mod_dir1.Counter;
pwmcntl1.Duty = DfuncStartup;
}
PWM_CNTL_MACRO(pwmcntl1)
// ------------------------------------------------------------------------------
// Connect inputs of the DATALOG module
// ------------------------------------------------------------------------------
DlogCh1 = (int16)mod_dir1.Counter;
DlogCh2 = (int16)HallState;
DlogCh3 = (int16)HallState;
DlogCh4 = _IQtoQ15(IDCfdbk);
#endif // (BUILDLEVEL==LEVEL7)
// ------------------------------------------------------------------------------
// Call the PWMDAC update macro.
// ------------------------------------------------------------------------------
PWMDAC_MACRO(pwmdac1)
// ------------------------------------------------------------------------------
// Call the DATALOG update function.
// ------------------------------------------------------------------------------
dlog.update(&dlog);
// ------------------------------------------------------------------------------
// Increase virtual timer and force 15 bit wrap around
// ------------------------------------------------------------------------------
VirtualTimer++;
VirtualTimer &= 0x00007FFF;
}//end if(RunMotor)
#if (DSP2803x_DEVICE_H==1)
/* Enable more interrupts from this timer
EPwm1Regs.ETCLR.bit.INT = 1;
// Acknowledge interrupt to recieve more interrupts from PIE group 3
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
*/
AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; // Clear ADCINT1 flag reinitialize for next SOC
// Acknowledge interrupt to recieve more interrupts from PIE group 1
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
#endif
#if (DSP280x_DEVICE_H==1)
// Enable more interrupts from this timer
EPwm1Regs.ETCLR.bit.INT = 1;
// Acknowledge interrupt to recieve more interrupts from PIE group 3
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
#endif
}// ISR Ends Here
//===========================================================================
// No more.
//===========================================================================
thanks in advance


