Hi,
I'm using DRV8711 and I step motor.
I have one problem. Help me please.
If I select that pulse speed (lower than 10kHz), motor have noise.
not noise at high speed.
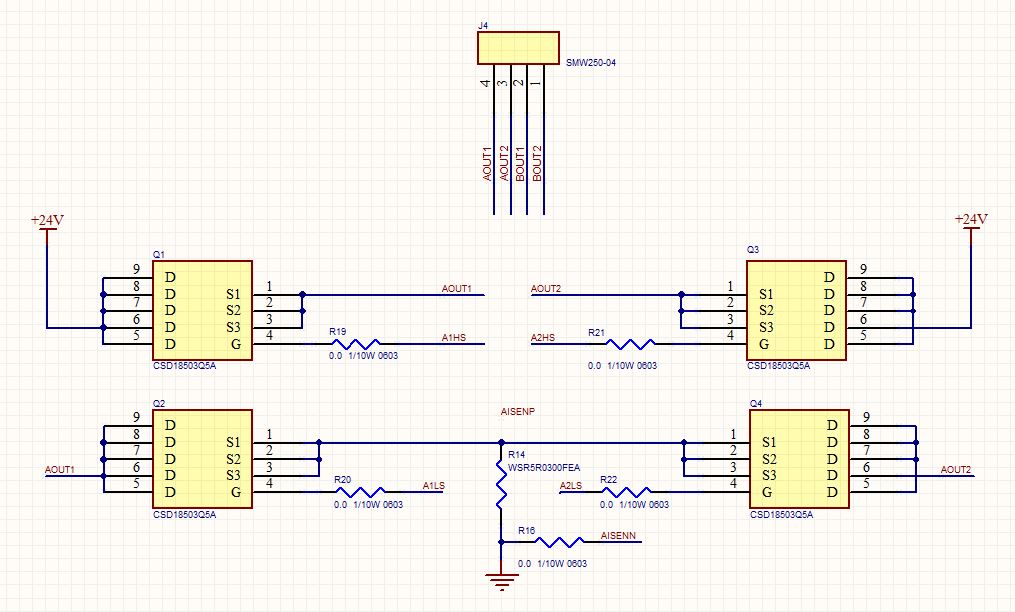 schemetic
schemetic
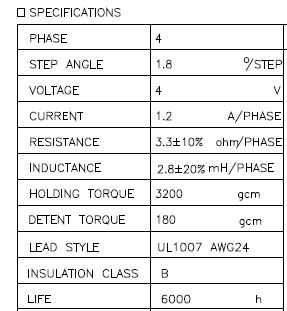 step motor spec.
step motor spec.
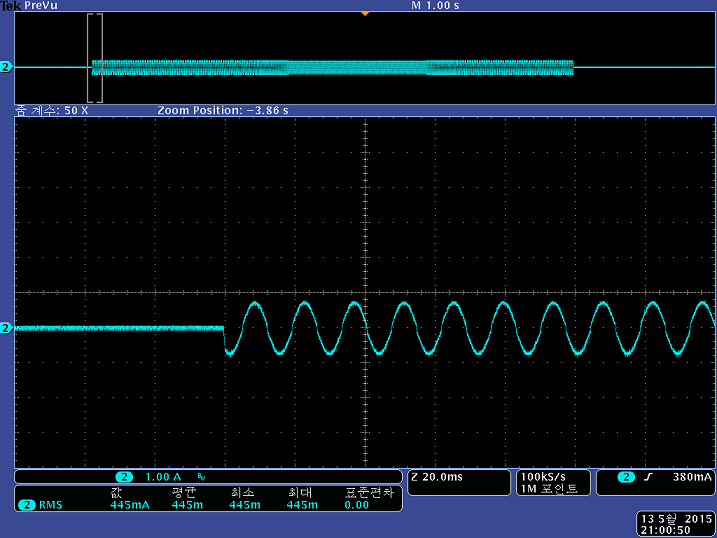
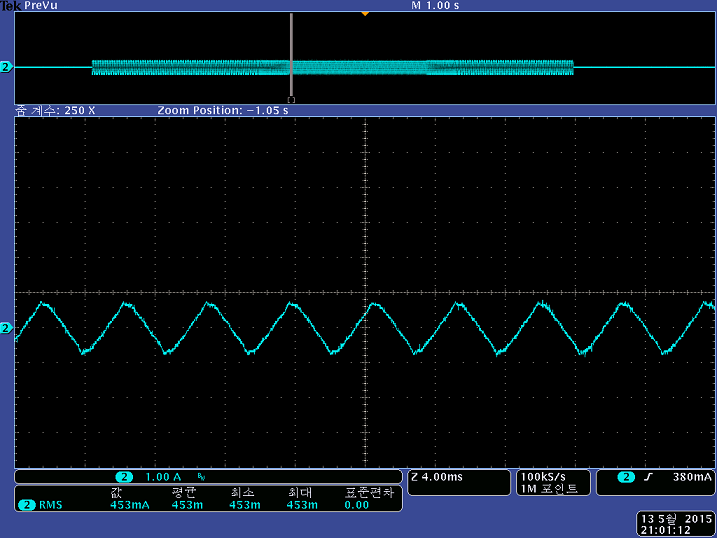
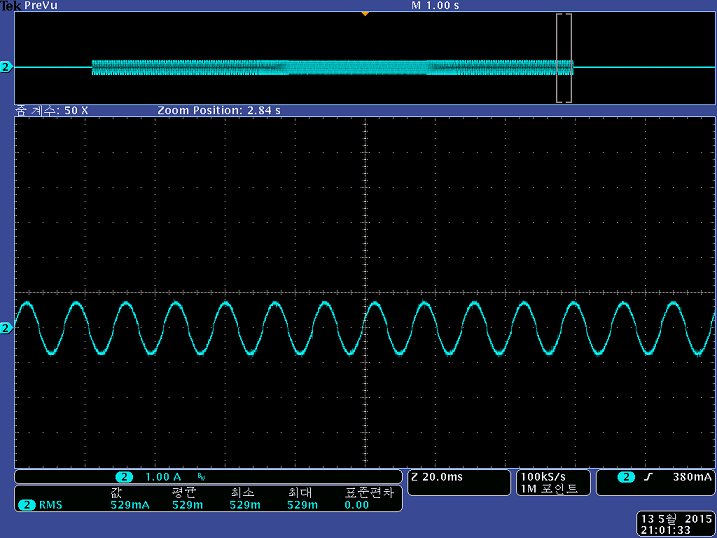
By the way, current waveform is different.
low speed waveform is not good but high speed waveform is bad.
What's the problem?
Thank you.