


Hello,
I'm working on a design that uses three unipolar hybrid steppers, with three very different sizes/working current. For the sake of simplicity in the design, I'm using the DRV8825 for all of them - as it seems they're all within the operation range of the driver.
But I believe that besides the selection of Vref to set the chopper current, Rsense must be adjusted for each motor (the bigger supports 1.5A peak current running cold, the smaller only 100mA).
Now that I'm making some integration tests and adjusting the currents on the steppers I have some doubts that remain unsolved after searching trough the TI forum and some application notes:
1) What are the considerations to select the proper value for Rsense?
Though lower values can handle bigger currents, the datasheet only states that the sense pin should be in the range -0.8V to +0.8V. For a 1A peak output current, for example, it seems 0.22Ω is too high. And for a 0.1A, do I need a bigger value to ensure a good control on the current? Does the motor inductance accounts for the selection of Rsense?
2) How the wire length from the driver output to the motor affects the system performance?
For the bigger Nema 17 one some issues occurred:
- The driver was heating at a 400mA peak current on the output - changing the Rsense value from 0.22Ω to 0.10Ω seemed to solve that issue
- It was configured to use 1/16 uStepping, but the motor was 'choking', what appeared in the current signal measured in one of the motor wires as a distorted sine wave (below)
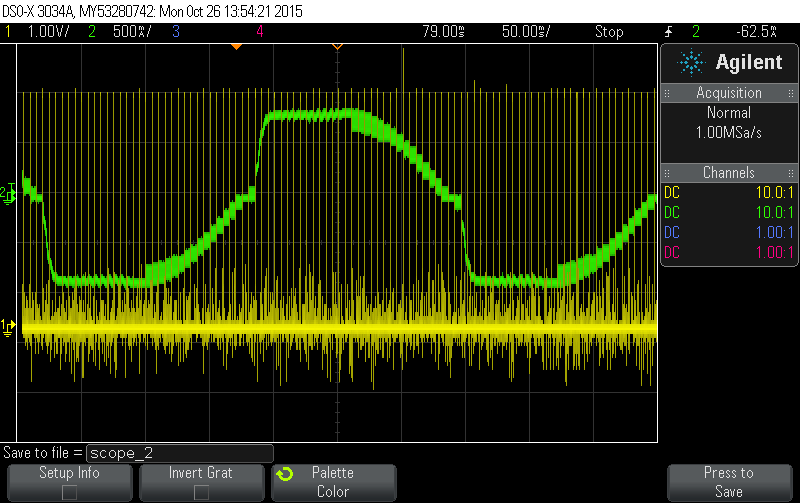
The yellow signal is the probe attached to the step pin of the driver, and the green is a current probe in one of the windings of the motor.
- putting the driver in fast decay mode instead of the default mixed decay (leaving the decay pin open) fixed that too:

Now I'm working on the intermediate motor, that should run at 400mA peak current. But if I raise the current by increasing the Vref, the sine wave gets distorted to a square:

So, my guess is that the inductance of the motor is too high (74mH), so I cannot increase the current without changing the Rsense value from the current 0.22Ω.
What determinates the chopper operation frequency, by the way?
