


Hi!
I would like to operate motor using cc2650STK, drv8830, DC 6V 55RPM TS-32Gz370-69.
using IAR Embedded Workbench IDE
but it didn`t operate at all....
i using Api sensorTag adding drv8830.c and drv8830.h of applying the function to be called
I2C that the connection between mcu and motor driver I`m not sure.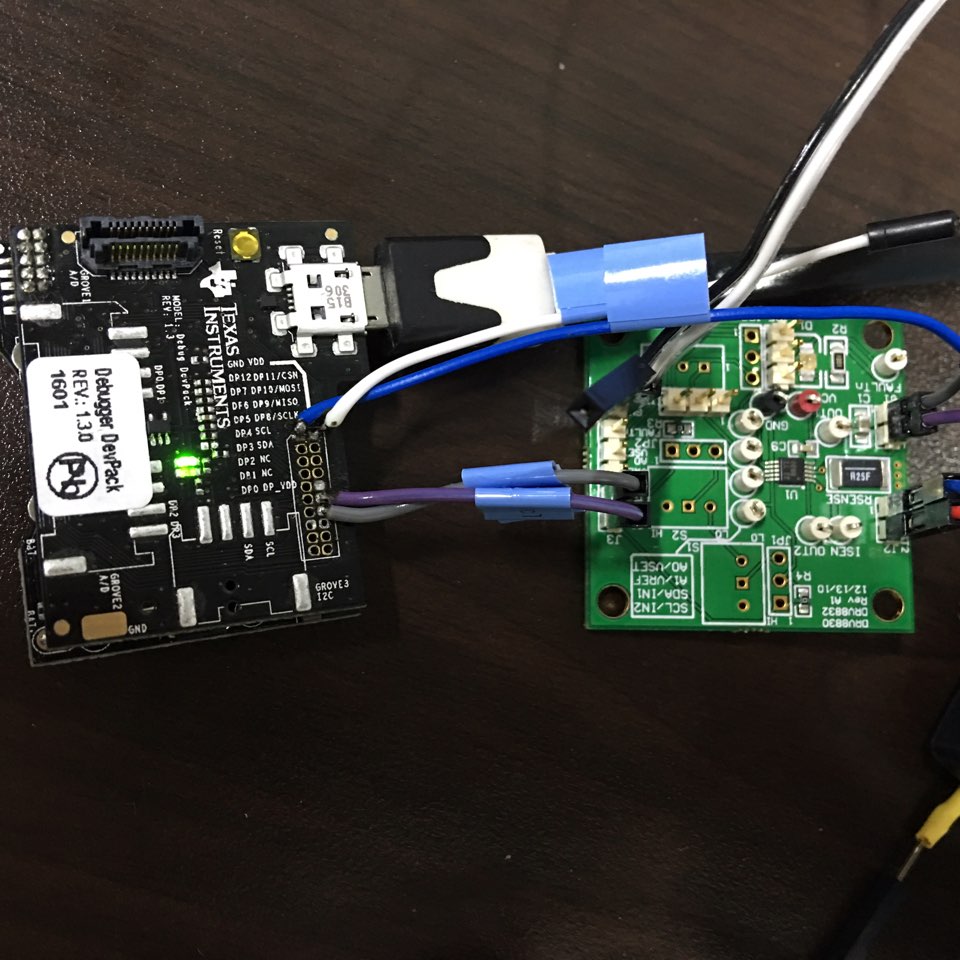

How can I verify that the I2C communication between two modules? The settings that are in the source code
If it is how to fix
I will source attached.
#include "sensor_drv8830.h"
#include "sensor.h"
#include "bsp_i2c.h"
#define SENSOR_I2C_ADDRESS DRV8830ADDR_NN
// fault status
#define DRV8830_F_CLEAR 0x80
#define SENSOR_SELECT() bspI2cSelect(BSP_I2C_INTERFACE_0,DRV8830ADDR_NN)
#define SENSOR_DESELECT() bspI2cDeselect()
#define DRV8830ADDR_00 0xc0
#define DRV8830ADDR_0N 0xc2
#define DRV8830ADDR_01 0xc4
#define DRV8830ADDR_N0 0xc6
#define DRV8830ADDR_NN 0xc8 //write address jp2, jp3 is open
#define DRV8830ADDR_N1 0xca
#define DRV8830ADDR_10 0xcc
#define DRV8830ADDR_1N 0xce
#define DRV8830ADDR_11 0xd0
// fault status
#define DRV8830_F_ILIMIT 0x10
#define DRV8830_F_OTS 0x08
#define DRV8830_F_UVLO 0x04
#define DRV8830_F_OCP 0x02
#define DRV8830_F_FAULT 0x01
// motor status
#define DRV8830_FREE 0x00
#define DRV8830_CW 0x01
#define DRV8830_CCW 0x02
#define DRV8830_BREAK 0x03
// register address
#define DRV8830_CONTROL 0x00
#define DRV8830_FAULT 0x01
// voltage data
#define DRV8830_V_R48 0x06
#define DRV8830_V_R56 0x07
#define DRV8830_V_R64 0x08
#define DRV8830_V_R72 0x09
// (no definition from 0.82V to 4.74V)
#define DRV8830_V_4R82 0x3c
#define DRV8830_V_4R90 0x3d
#define DRV8830_V_4R98 0x3e
#define DRV8830_V_5R06 0x3f
#define DRV8830_V_MIN 0x06
#define DRV8830_V_MAX 0x3f
#define DRV8830_V_RANGE (DRV8830_V_MAX - DRV8830_V_MIN)
// Voltage Control
#define DRV8830_FREE 0x00
#define DRV8830_POSI 0x01
#define DRV8830_NEGA 0x02
#define DRV8830_BREAK 0x03
// Voltage table
#define TBL_OFFSET 0x06
#define TBL_SIZE 58
#define TBL_MAX_VALUE (5.06f)
#define TBL_MIN_VALUE (0.48f)
#define DATA_SIZE 2
/* Register length */
#define REGISTER_LENGTH 2
static uint8_t buf[DATA_SIZE];
static uint16_t val;
//static bool success;
const float voltage_table [] = {
0.48, 0.56, 0.64, 0.72, 0.80, 0.88, 0.96, 1.04,
1.12, 1.20, 1.29, 1.37, 1.45, 1.53, 1.61, 1.69,
1.77, 1.85, 1.93, 2.01, 2.09, 2.17, 2.25, 2.33,
2.41, 2.49, 2.57, 2.65, 2.73, 2.81, 2.89, 2.97,
3.05, 3.13, 3.21, 3.29, 3.37, 3.45, 3.53, 3.61,
3.69, 3.77, 3.86, 3.94, 4.02, 4.10, 4.18, 4.26,
4.34, 4.42, 4.50, 4.58, 4.66, 4.74, 4.82, 4.90,
4.98, 5.06
};
bool sensorDrv8830Init(void){
return sensorDrv8830Enable(true);
}
bool sensorDrv8830Enable(bool enable){
bool success;
uint8_t pwm_rate = 0;
if (!SENSOR_SELECT())
return false;
buf[0]=0x00;
success = sensorReadReg(DRV8830_FAULT, &buf[0], REGISTER_LENGTH);
val = DRV8830_F_CLEAR;
success = sensorWriteReg(DRV8830_FAULT, (uint8_t *)&val, REGISTER_LENGTH);
if(enable)
val = DRV8830_CW;
else
val = DRV8830_FREE;
success = sensorWriteReg(DRV8830_CONTROL, (uint8_t *)&val, REGISTER_LENGTH);
pwm_rate = DRV8830_V_MAX;
val = (pwm_rate << 2) + DRV8830_CW;
success = sensorWriteReg(DRV8830_CONTROL, (uint8_t *)&val, REGISTER_LENGTH);
SensorTag_blinkLed(Board_LED1,10);
SENSOR_DESELECT();
return success;
}
void sensorDrv8830Start(void)
{
}
void sensorDrv8830Speed(float speed) {
uint8_t direction = 0;
uint8_t pwm_rate = 0;
uint8_t dt[2];
bool success;
if (speed == 0.0f ){
pwm_rate = DRV8830_V_MIN;
direction = DRV8830_FREE;
} else if (speed > 0.0f){
pwm_rate = (uint8_t)(DRV8830_V_RANGE * speed) + DRV8830_V_MIN;
direction = DRV8830_CW;
} else if (speed < 0.0f){
speed *= -1;
pwm_rate = (uint8_t)(DRV8830_V_RANGE * speed) + DRV8830_V_MIN;
direction = DRV8830_CCW;
}
if (pwm_rate > DRV8830_V_MAX){
pwm_rate = DRV8830_V_MAX;
} else if (pwm_rate < DRV8830_V_MIN){
pwm_rate = DRV8830_V_MIN;
}
dt[0] = DRV8830_CONTROL;
dt[1] = (pwm_rate << 2) + direction;
// success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
// if (success)
// {
// if (!SENSOR_SELECT())
// return;
SENSOR_SELECT();
bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
//}
}
void sensorDrv8830Voltage(float volt) {
uint8_t direction = 0;
uint8_t pwm_rate = 0;
uint8_t dt[2];
bool success;
success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
if (volt < 0){
direction = DRV8830_NEGA;
volt *= -1;
} else {
direction = DRV8830_POSI;
}
if (volt >= TBL_MAX_VALUE) {
pwm_rate = TBL_SIZE + TBL_OFFSET - 1;
} else {
for (uint32_t i = 0; i < TBL_SIZE; i++){
if (volt < voltage_table[i]) {
//printf("n=%d, voltage_table[i]=%f\r\n", i, voltage_table[i]);
if (i == 0){
pwm_rate = 0;
direction = DRV8830_FREE;
} else {
pwm_rate = i + TBL_OFFSET;
}
break;
}
}
}
//printf("volt=%f, pwm=0x%x, dir=%d\r\n", volt, pwm_rate, direction);
dt[0] = DRV8830_CONTROL;
dt[1] = (pwm_rate << 2) + direction;
if (success)
{
if (!SENSOR_SELECT())
return;
success = bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
}
}
uint8_t sensorDrv8830Status() {
uint8_t dt[2];
bool success;
dt[0] = DRV8830_FAULT;
success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
if (success)
{
if (!SENSOR_SELECT())
return dt[0];
success = bspI2cWriteRead((uint8_t *)dt, 1, (uint8_t *)dt, 1);
SENSOR_DESELECT();
}
return dt[0];
}
void sensorDrv8830Reset() {
uint8_t dt[2];
bool success;
dt[0] = DRV8830_FAULT;
dt[1] = DRV8830_F_CLEAR;
if (success)
{
if (!SENSOR_SELECT())
return;
success = bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
}
}


