I have been doing some testing on a DRV8825 Pololu module from China. I have found that the unit gets very hot and has very poor microstepping as compared to the A4988, I was wondering if this was expected or if it might be a knock off chip in these modules?
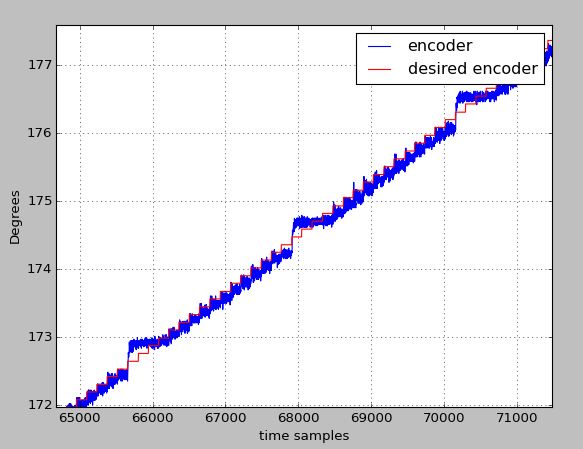
Specifically on the microstepping I have connected an encoder to the motor and monitored the motor angle and found that the 16x microstepping causes motor to jump forward or lag behind 2-4 microsteps. I have tried increasing current and when I do the motor starts humming and getting really hot, but the performance does not improve.
When I replace the module with an A4988 module the error is less than 1 microstep with lower current and no noise. I had expected that the TI chip would far exceed the A4988 chip and hence wanted to see if this is expected behavior of the DRV8825?