Hello,
we are using the DRV8711 driver IC in an application with this stepper motor: Nanotec ST8918M6708 (https://de.nanotec.com/produkte/566-st8918-schrittmotor-nema-34/).
The schematic is nearly the same than on the eval board, only other FETs were used. We use CSD19532QB5 (http://www.ti.com/lit/ds/symlink/csd19532q5b.pdf). The supply is 48V
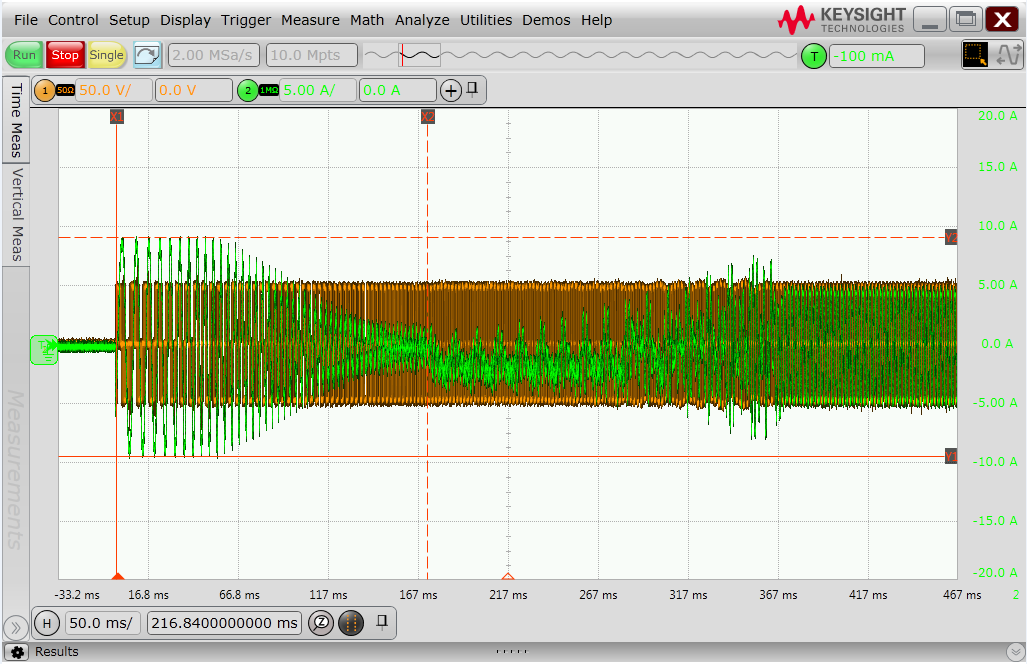
The motor is specified to run until 2100/min, but when we reach about 1200/min the current regulation cannot hold the current on the desired value and then the overcurrent protection stops the driver. Here you can see when this happens:
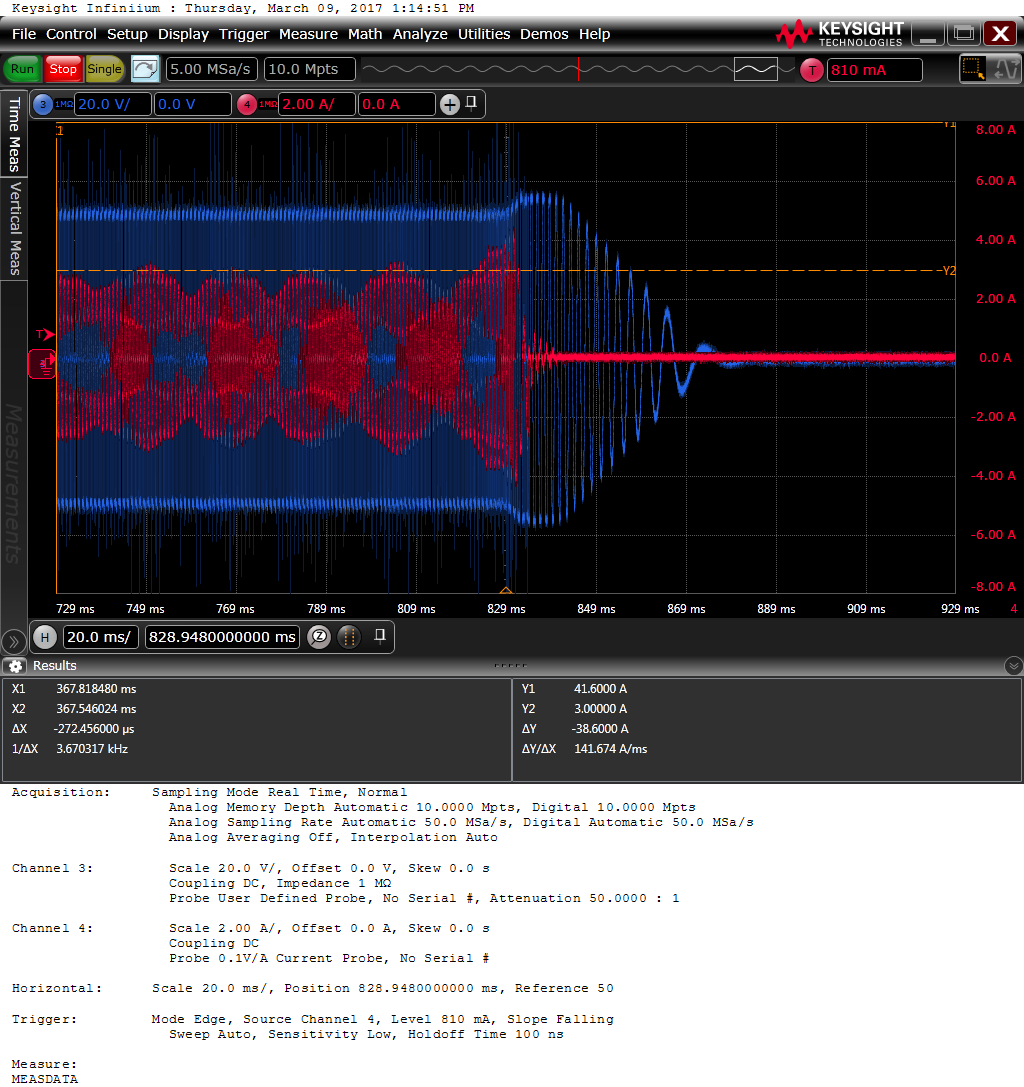
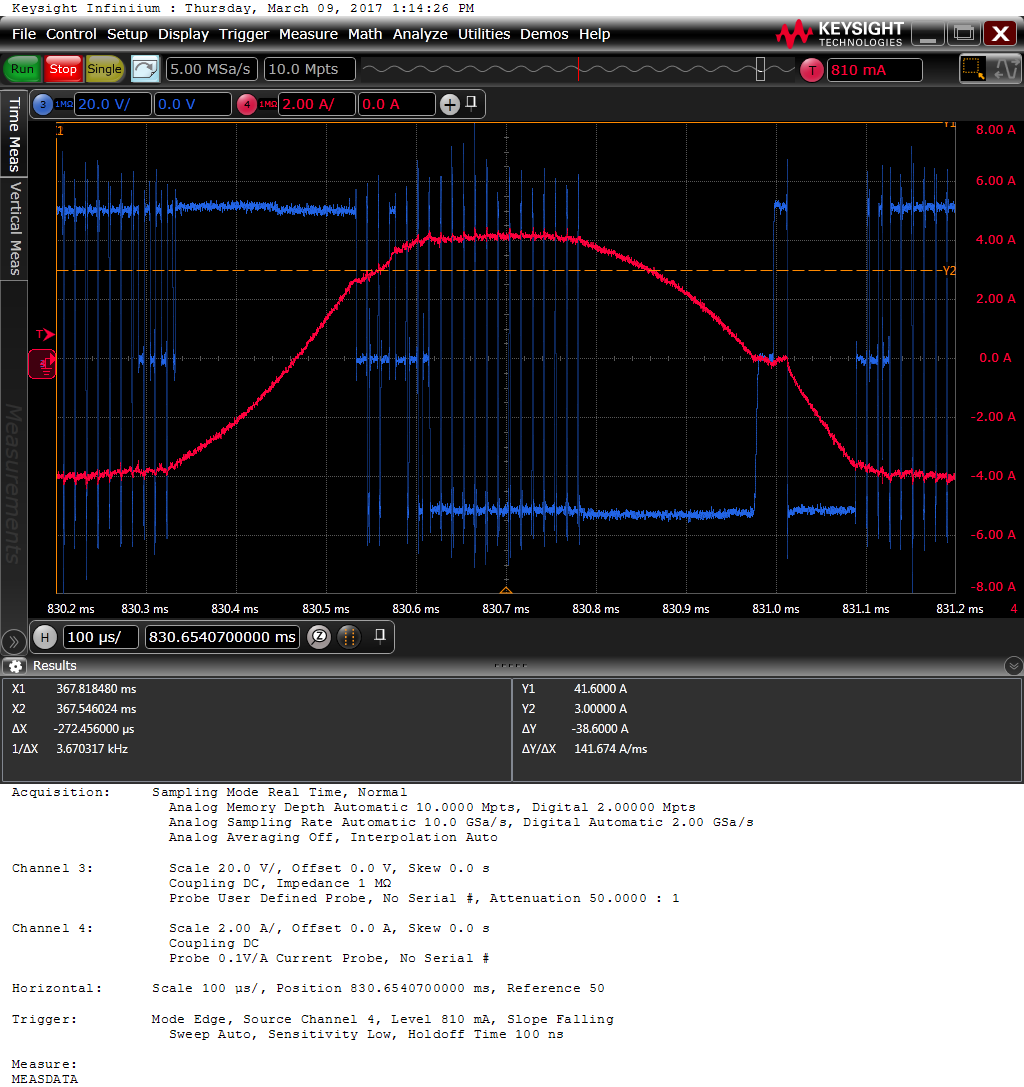
In detail: The desired current is 2.6A (the orange line) but neither slow nor fast decay can decrease the current.
To config the driver I do the following:
Stepper.Driver.Ctrl |= STEPPER_CTRL_ENBL;
Stepper.Driver.Ctrl |= STEPPER_CTRL_EXSTALL;
Stepper.Driver.Ctrl |= STEPPER_CTRL_MODE_HALF_STEP;
Stepper.Driver.Ctrl |= STEPPER_CTRL_ISGAIN_20;
Stepper.Driver.Ctrl |= STEPPER_CTRL_DTIME_450;
Stepper.Driver.Torque |= TORQUE;
Stepper.Driver.Torque |= STEPPER_TORQUE_SMPLTH_50;
Stepper.Driver.Off |= 20;
Stepper.Driver.Blank |= 50;
Stepper.Driver.Decay |= 100;
Stepper.Driver.Decay |= STEPPER_DECAY_DECMOD_ALL_AUTO;
Stepper.Driver.Stall |= 60;
Stepper.Driver.Stall |= STEPPER_STALL_SDCNT_4;
Stepper.Driver.Stall |= STEPPER_STALL_VDIF_8;
Stepper.Driver.Drive |= STEPPER_DRIVE_OCPTH_500;
Stepper.Driver.Drive |= STEPPER_DRIVE_OCPDEG_2;
Stepper.Driver.Drive |= STEPPER_DRIVE_TDRIVEN_250;
Stepper.Driver.Drive |= STEPPER_DRIVE_TDRIVEP_250;
Stepper.Driver.Drive |= STEPPER_DRIVE_IDRIVEN_300;
Stepper.Driver.Drive |= STEPPER_DRIVE_IDRIVEP_200;
I tested all decay modes and modified all other settings, but it always is the same result. When reaching a specific rpm value (maximum around 1200/min) this behavior happens.
Does anyone has an idea what I am doing wrong?
Cheers,
Christoph