


Other Parts Discussed in Thread: DRV10983
Dear TI-E2E Community
I'm evaluating the DRV10983 using the EVM, for our Air Damper Actuator applications. The goal of my development is to minimize the maximum torque when actuator drives into the end stop.
I've a few problems with the TI-Driver :
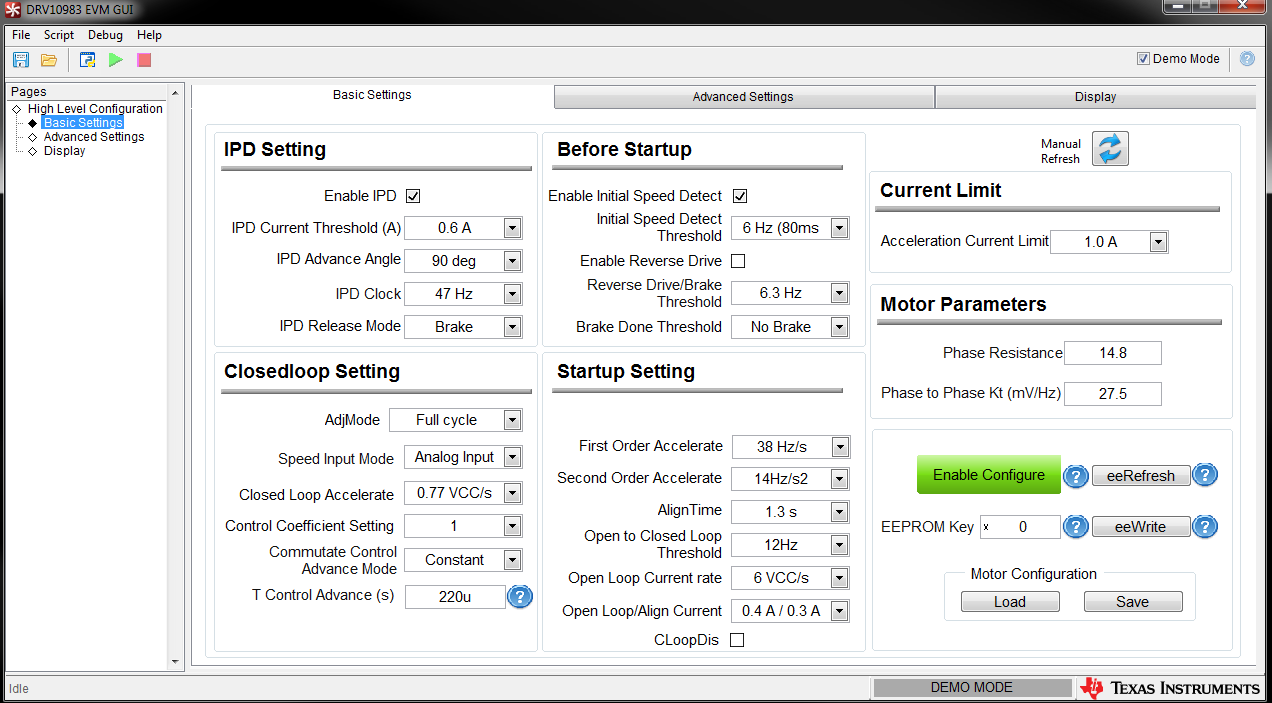
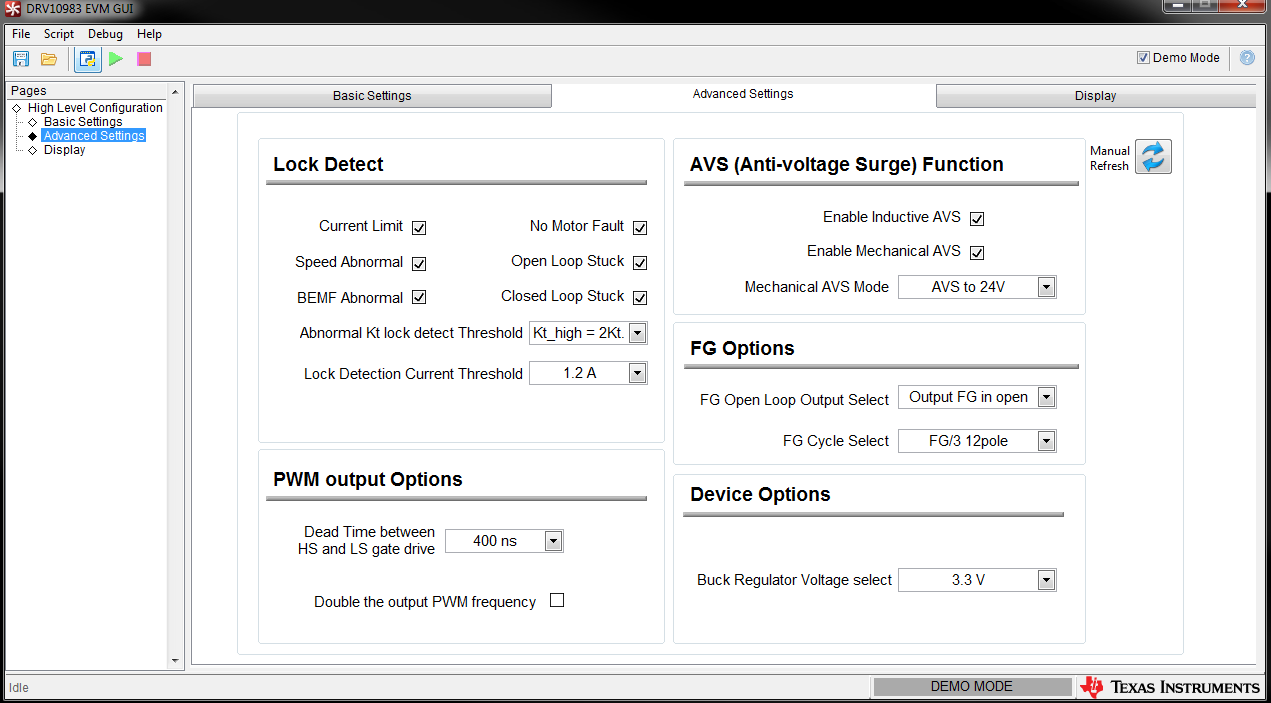
1. The first problem is at the drive up the Motor in OpenLoop and switch to ClosedLoop. Sometimes the motor needs 3-5 runs until it works. (in the attachment are the Basic and Advanced Settings from the EVM-GUI)
What parameters should I change to drive as fast as possible in closed loop?
2. The second problem is to detect the end stop of the actuator. The Ti-driver turns off automatically when the Motor can't be driven anymore, but that takes to much time. There is the risk that during this time the peak torque could destroy the transmission of the actuator. The Motor is driven at 500 rpm or 829 rpm.
Is there a possibility to detect the end stop detection faster, perhaps with an external circuit and the FG pin?
Attachment:
Motor Parameters:
Motor pol pair: 6
Phase resistance: 14.5 Ohm
Phase to Phase Kt: 2.67V @1000RPM 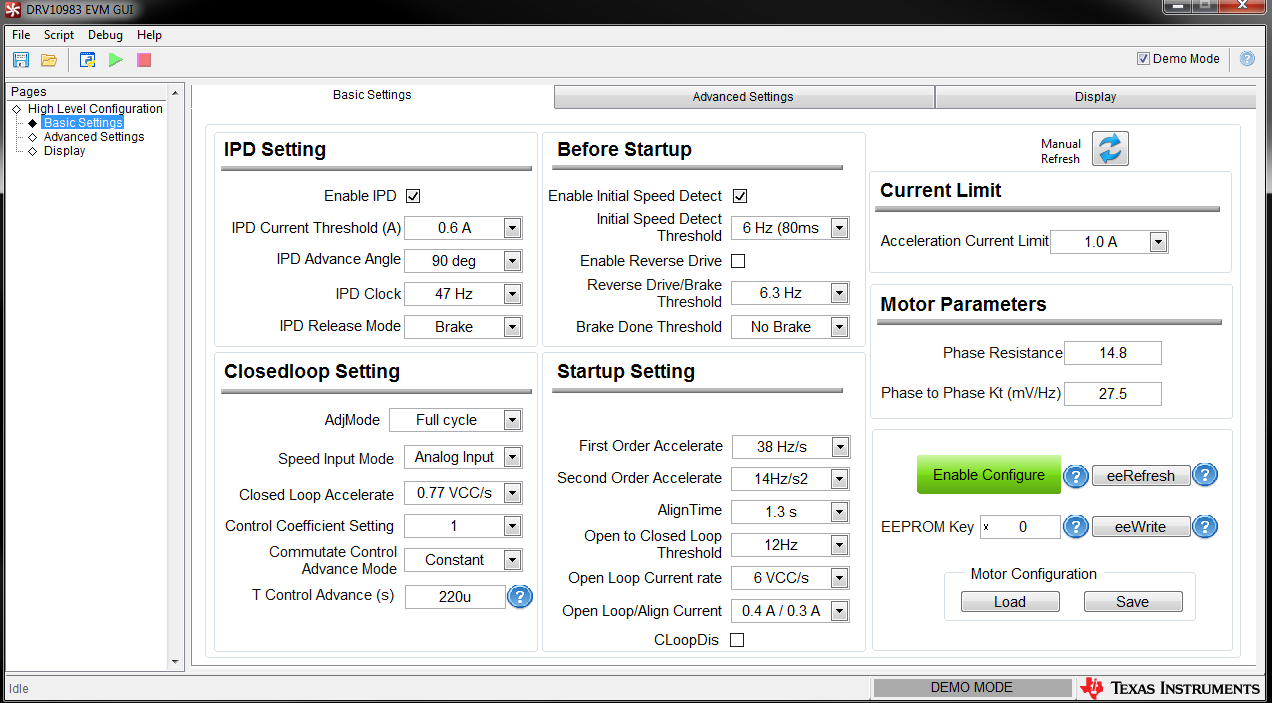
EVM-GUI Settings
Best Regards,
Ulascan Yildirim
SIEMENS BT CPS R&D
