Other Parts Discussed in Thread: DRV8825, ,
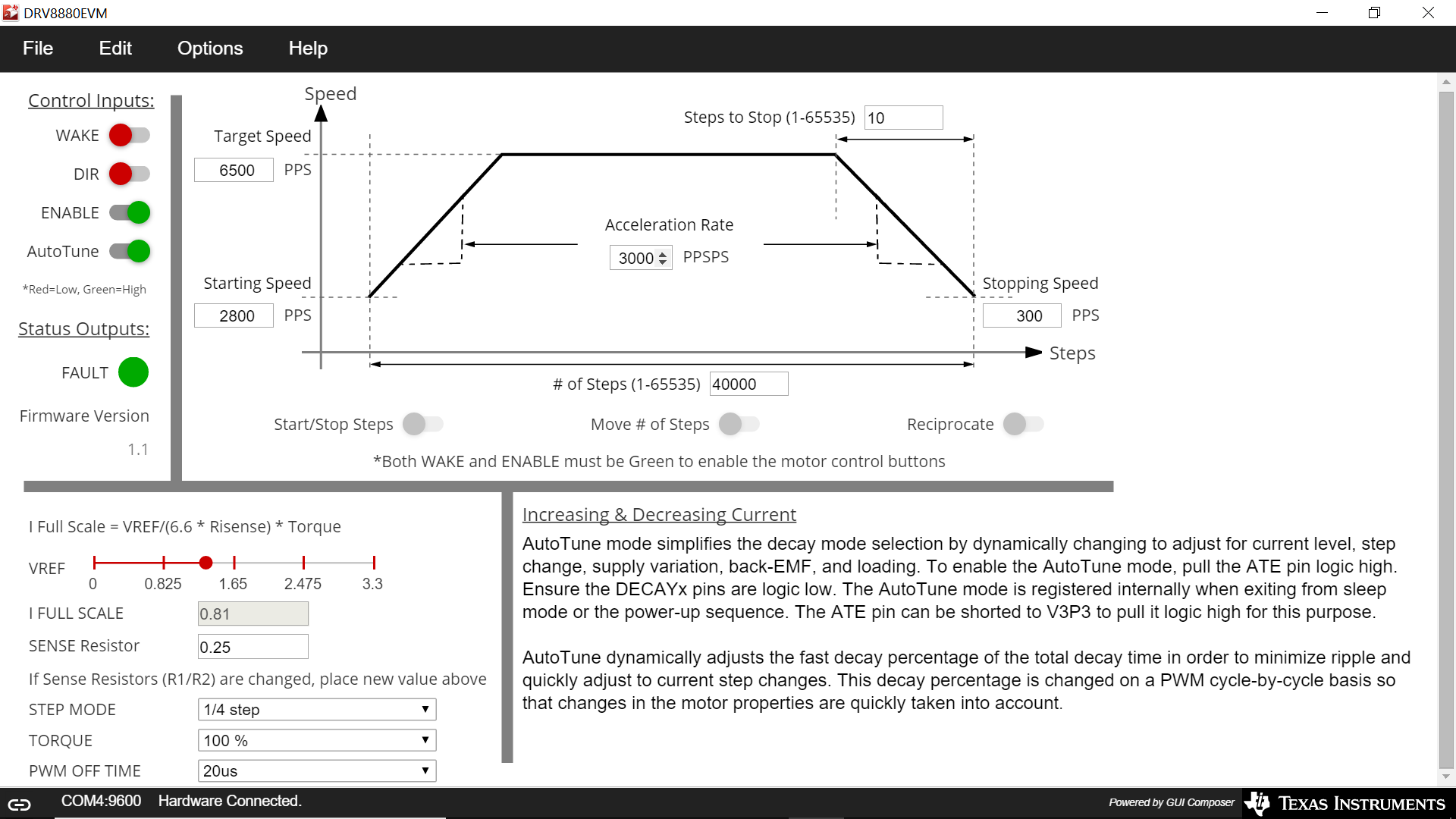
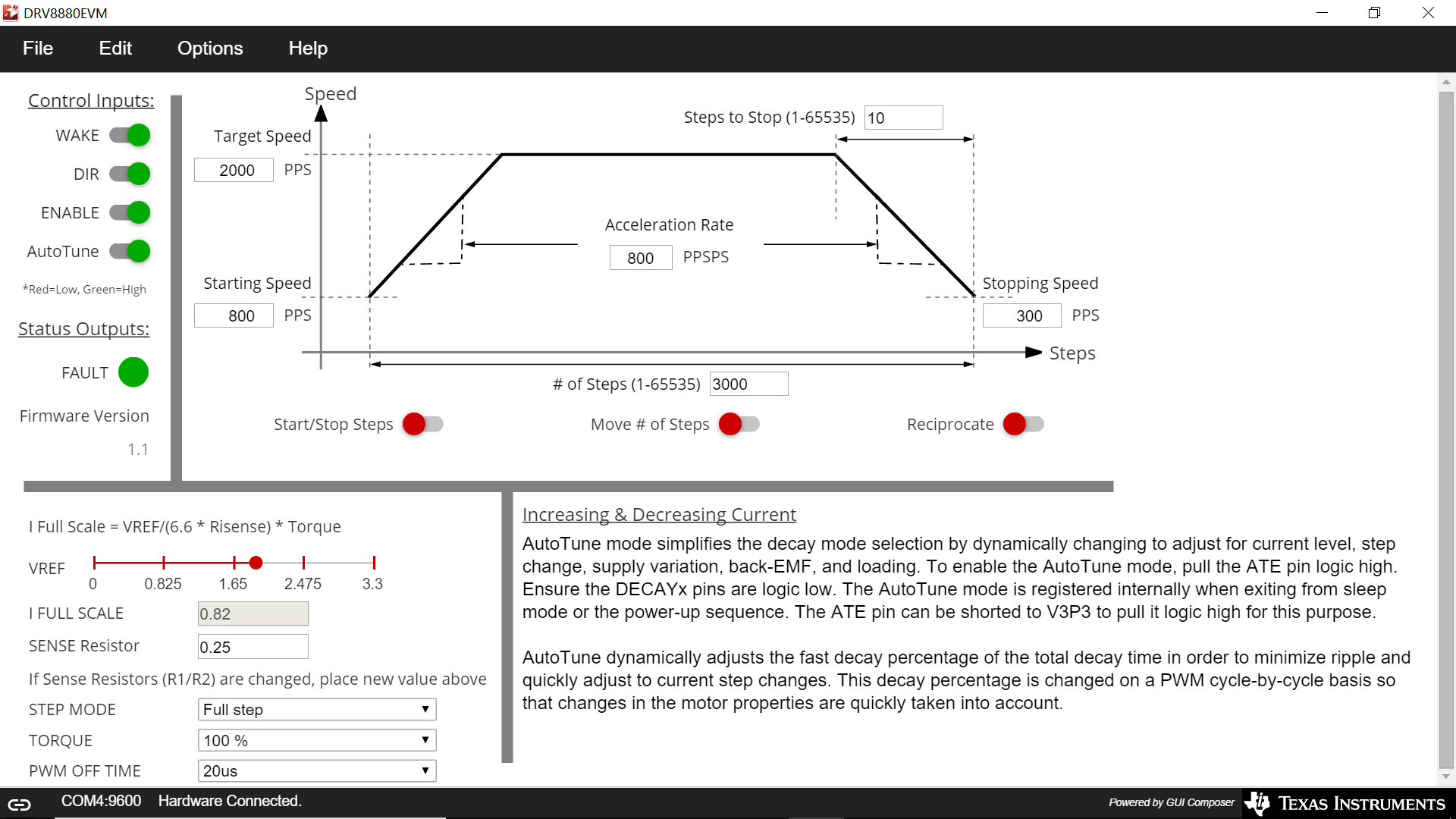
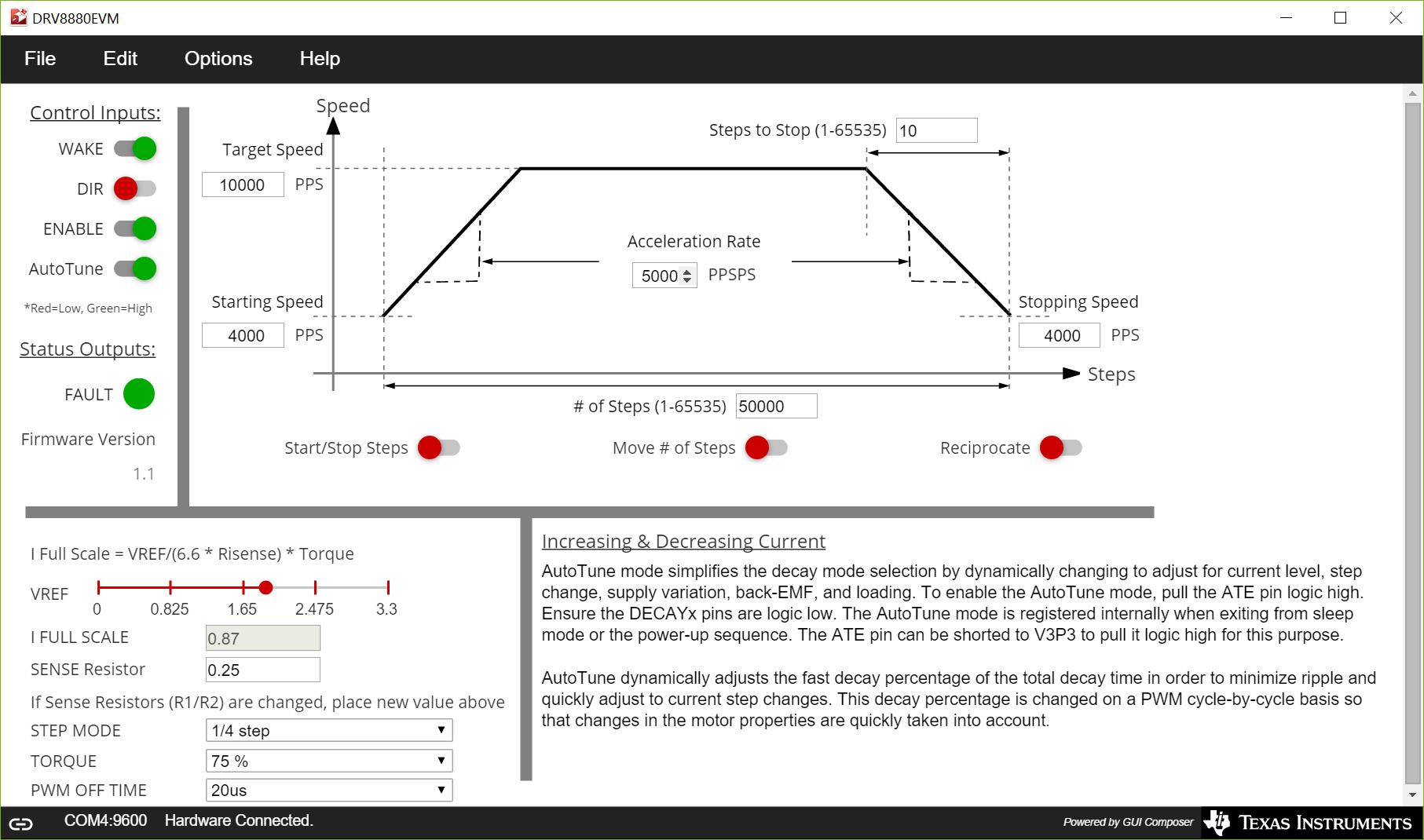
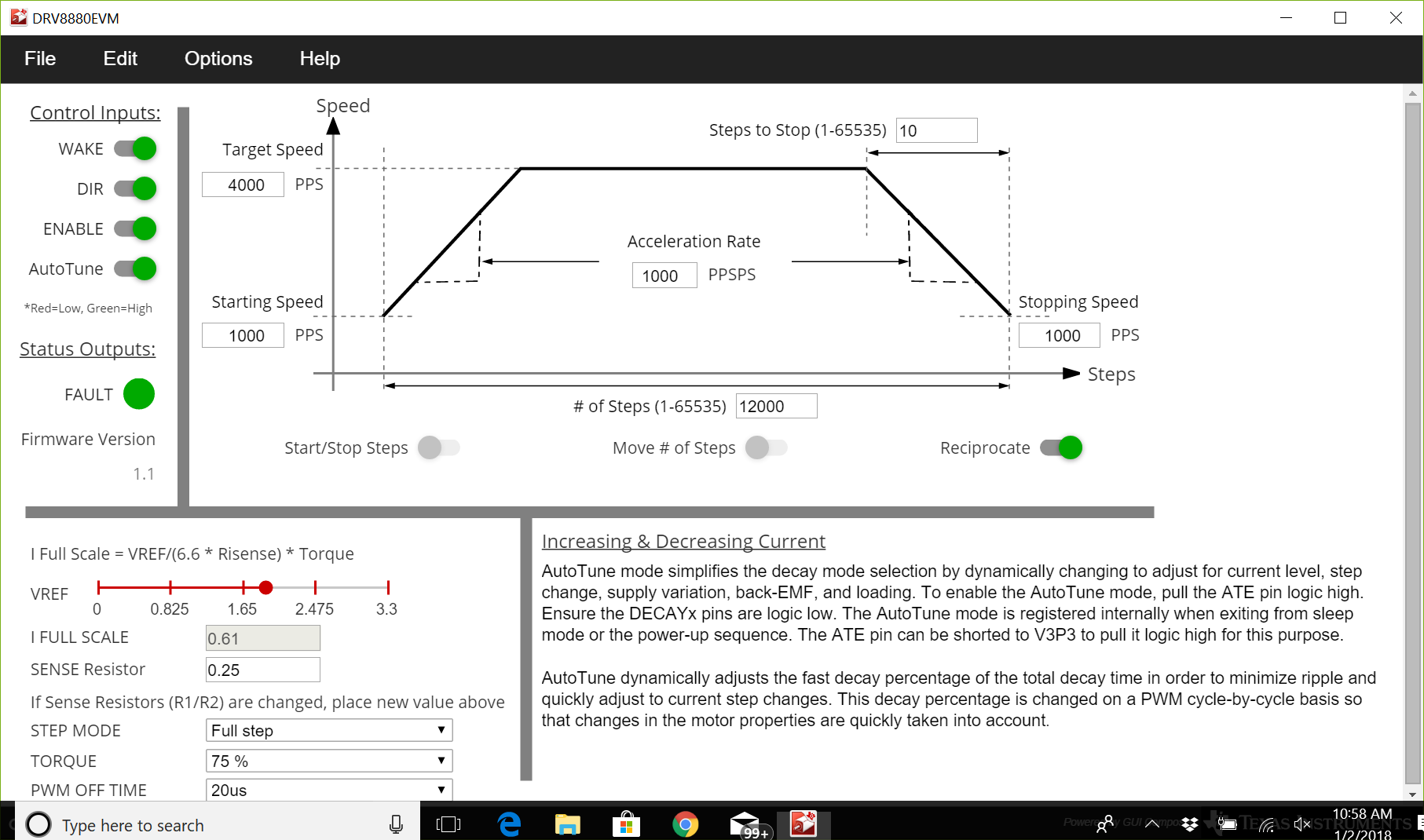
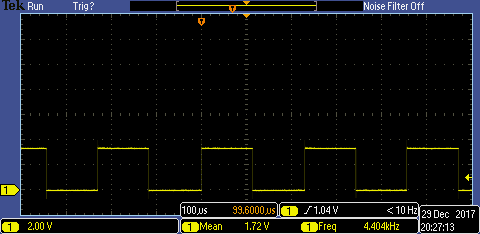
I have an product that I'm trying to find the "right" settings for the DRV8880. I have the DRV8880EVM and was testing different conditions with my motor (see attachments). I'm using a custom application to generate the control signals to the DRV8880 and the currrent code does not have any acceleration controls, just PWM frequency. The prior prototype was based on the DRV8825 and the last PWM setting yielded ~4kHz pulse rate (see attached scope plot).
I was using a different motor and slide for the DRV8825 prototype but by sending this step and varying the mode pins (using AutoTune) the motor just whines and does not move. Using the EVM and GUI connected to the new motor/slide arrangement I can get the same results but by adjusting the starting speed, stopping speed, and acceleration I can make the motor move but at this point I'm just making random uneducated guesses.
The motor doesn't have to move fast but with a 6" travel I don't want the operator to have to sit and twiddle their thumbs while the motor moves. The basic operation is that the motor moves a stage that exits a chamber. The operator then places a sample on the stage, pushes GO, and the stage retreats back inside the chamber where it will make a series of small moves (~15mm) back and forth for several hours.
I don't see any faults when the motor whines and I'm currently using a bench top power supply set at 24V and a current limit of 1.1A. For the most part the power supply sits at supplying ~350mA.
I'm hoping that someone can help me learn the best way to adjust and set the appropriate parameters as I was hoping that by switching to the DRV8880 and using AutoTune I wouldn't have to become a motor expert. We can add code to apply some acceleration parameters to adjust the PWM but of course if that's not needed it's preferred not to add additional work.
Thank in advance for the help and education!