Hi,
I'm using DRV8840 to control a 12V DC motor and the nFAULT signal is not operating according to the data sheet.
The first issue is an unexpected triggering of the nFAULT that happens when the direction is changed. The current is steady, about 1.4 A, no peaks and when the polarity is reversed, nFAULT is driven low. Interestingly it only happens in one way (from clockwise to ccw, but not from ccw to cw). Despite the incorrectness of this behaviour, it is perfectly regular and predictable, so I changed my SW to reset the device whenever the motor is activated or reversed and now I live with this.
The real issue is when it is NOT triggered.
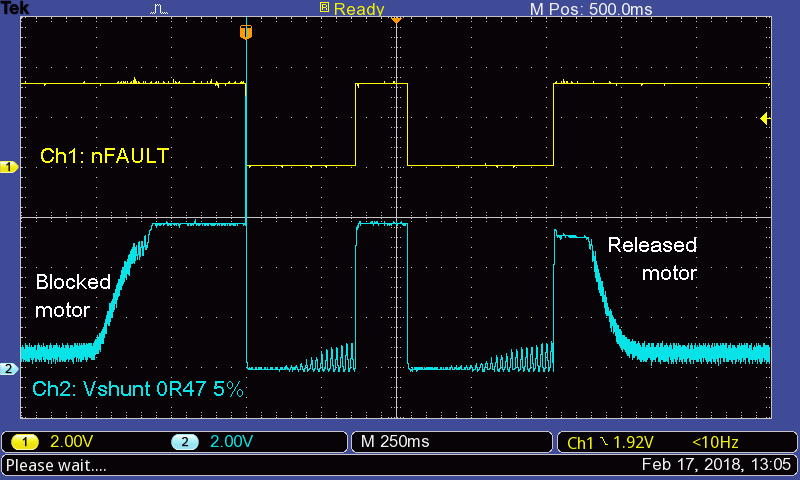
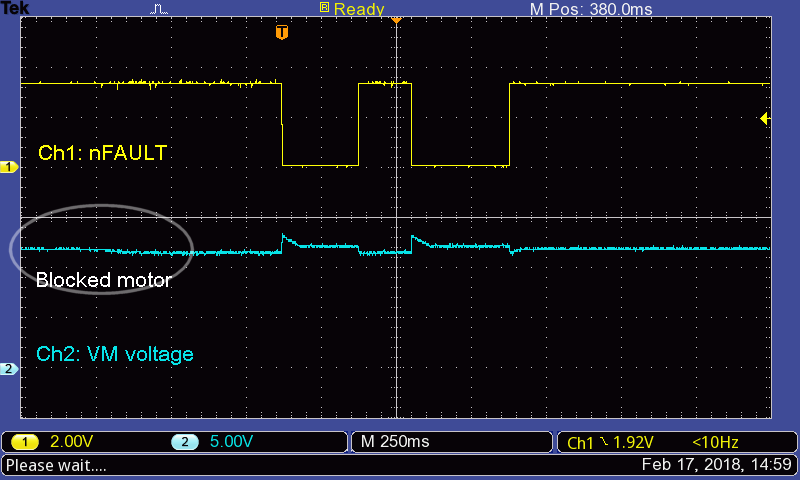
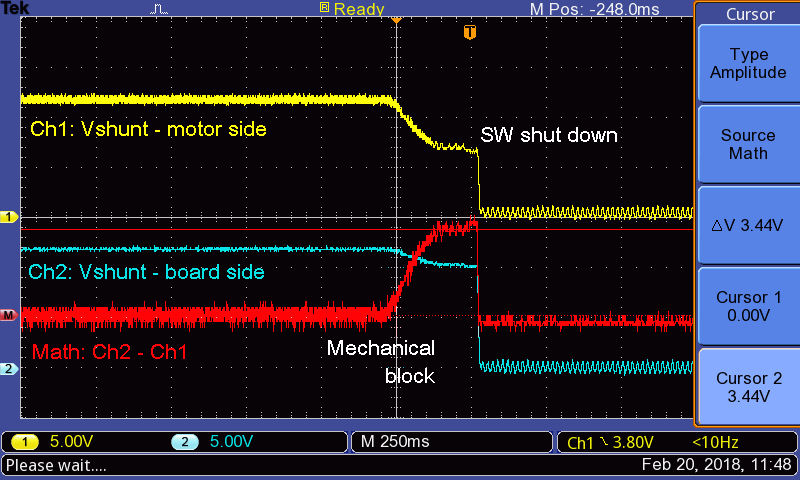
Under a certain faulty mechanical condition, the driven motor can be blocked, and the microcontroller must take an action. I counted on nFAULT to warn me, but it refuses to do so.
When the motor is blocked, the current quickly surpasses 6 A and the driver is shut off, but nFAULT remains high without a glitch. In this condition, if I remove the mechanical block and enable the motor again, it will respond even without reset.
The behaviour is the same with DECAY = 1 or 0.
Find below the corresponding piece of my current schematics. All the nets at the right side are connected to the microcontroller via a 22R resistor.
Any help is welcome.
Regards
Alex