Other Parts Discussed in Thread: DRV10983
I have read and re-read slou395d.pdf which has been helpful but I am unable to control the speed of the motor effectively.
The motor parameters are as follows:
| Item Number | Operation Voltage | Noof Poles | Max speed (rpm) | Max Current | R (Phase- CT) | Kt (ph-ph) | LR Constant | Intertia Time |
| Maxon EC32 | 24 | 8 | 4530 | 0.5 | 6.850 | 80 | ? | 304mS |
I include a copy of the data available from Maxon below.
I have determined the Inertia T using the method recommended in the guide.
I do not have a current probe for my scope so havent been able to determine the LC constant.
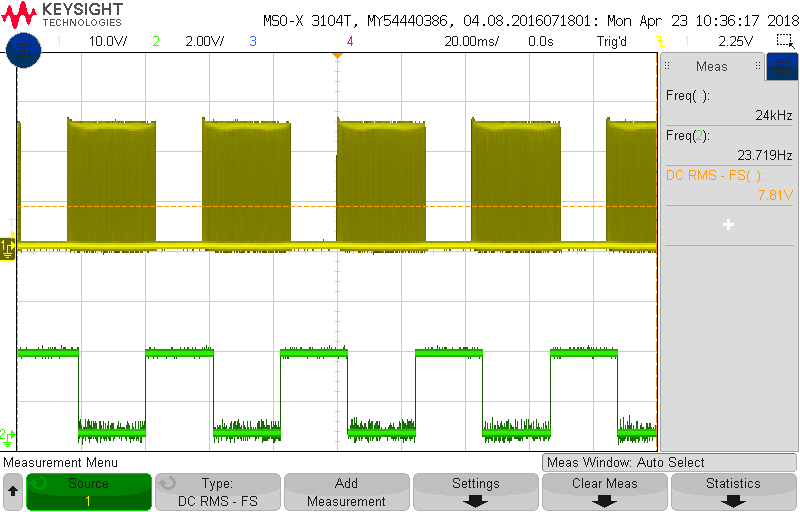
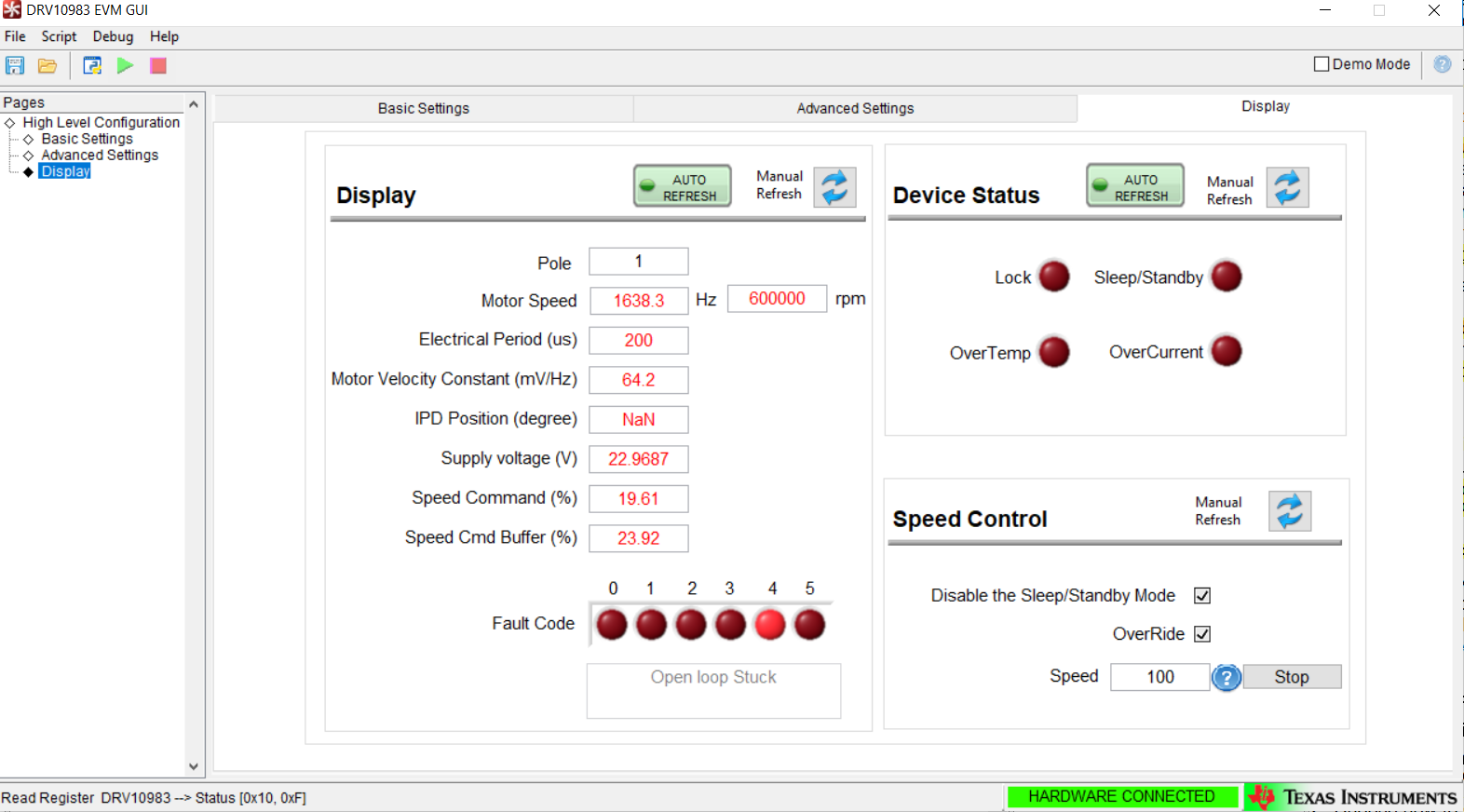
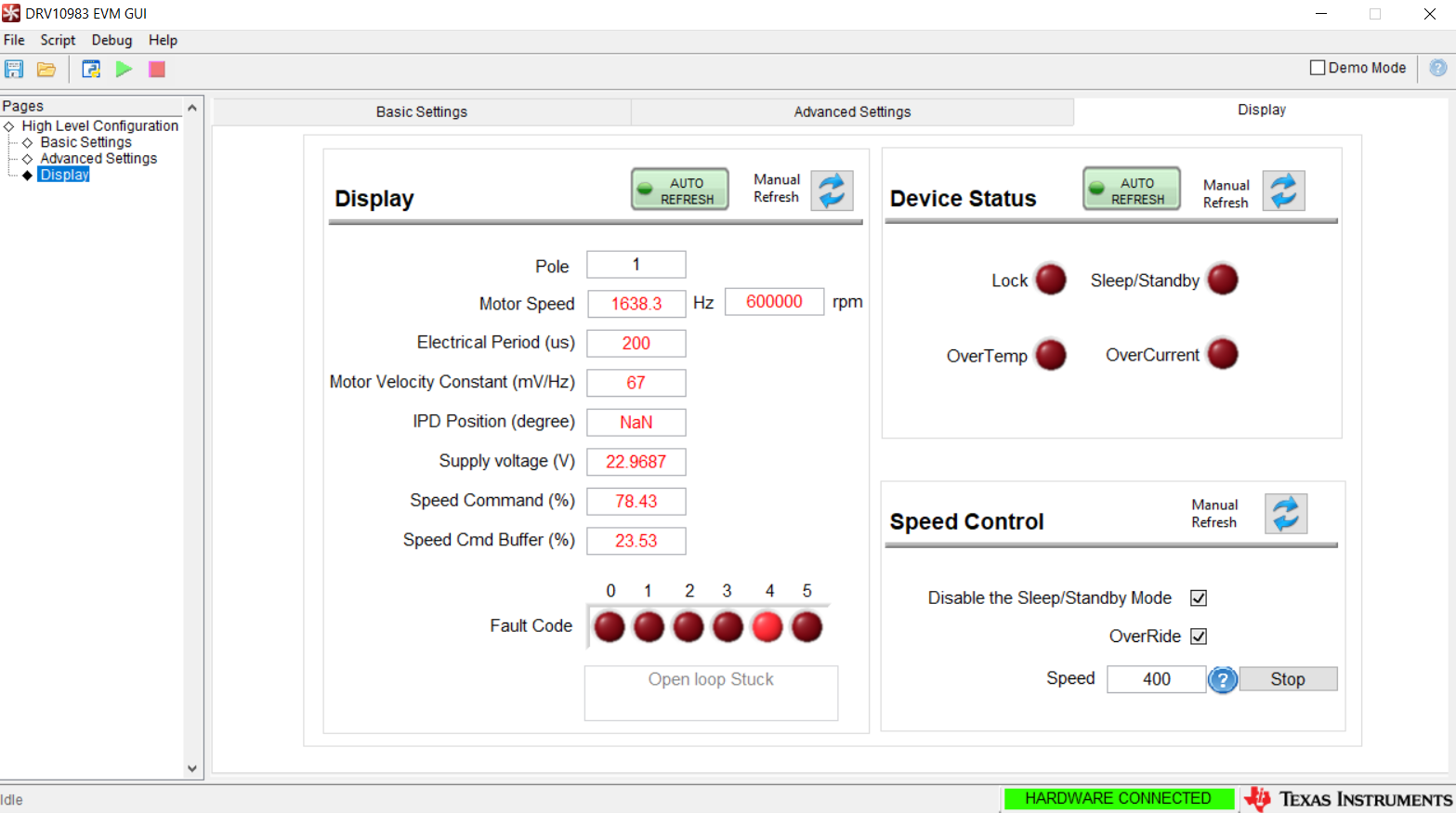
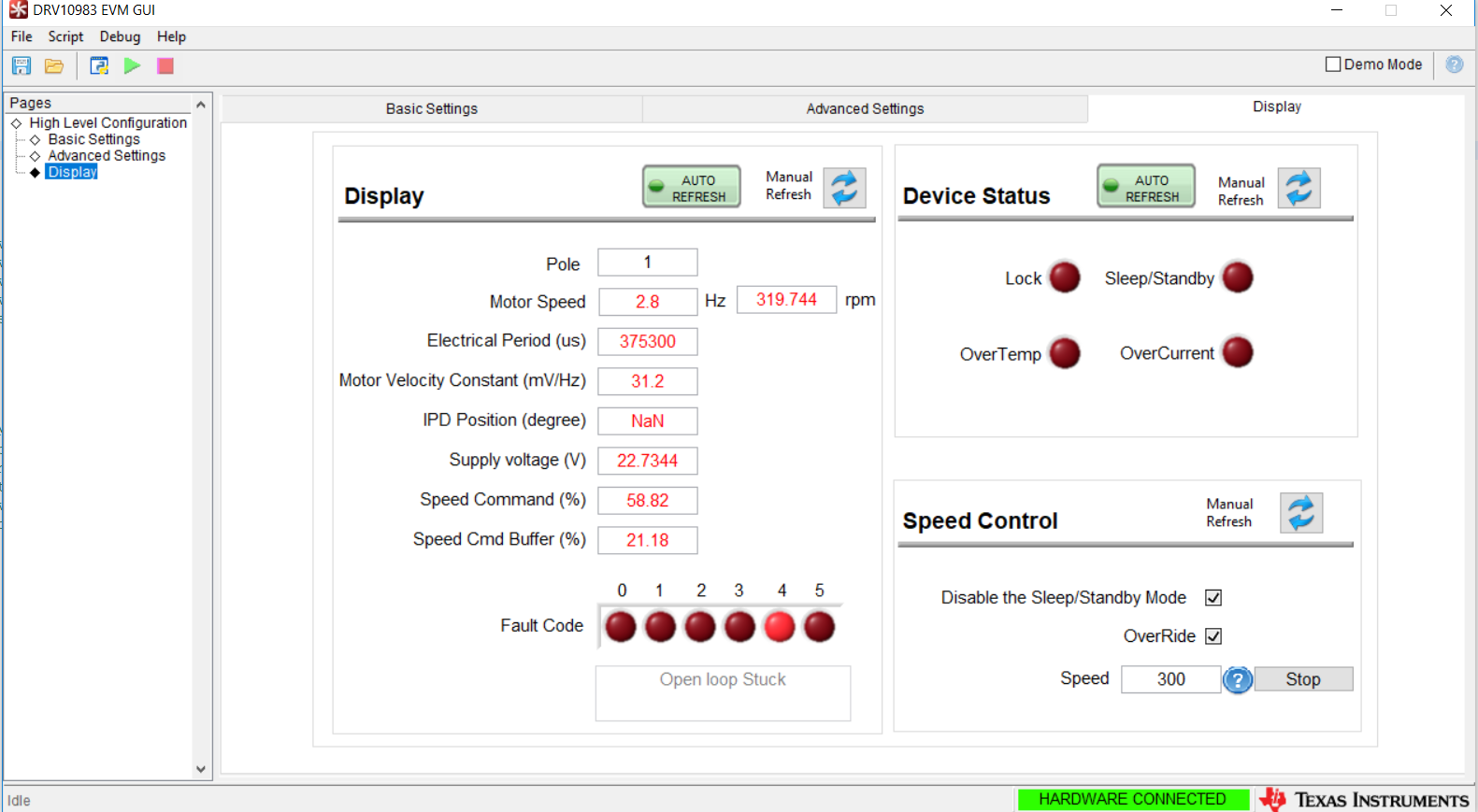
In open loop mode I can start the motor and fan blades running but I don't seem to be able to reach my target speed which is 600 rpm. The motor reaches 320 rpm and then changing the speed demand has no effect and varying parameters such as Kt and Phase resistance etc only increases the current from the PSU but does not increase the speed at all.
Similarly if I change the Open Loop/Align Current value from 0.4A to 0.8A the current consumption increases but the speed does not change.
What am I doing wrong?
Best regards
John
The motor configuration file is:
DRV10983 0x20 0x6D
DRV10983 0x21 0x2A
DRV10983 0x22 0x3B
DRV10983 0x23 0x0
DRV10983 0x24 0x40
DRV10983 0x25 0xFD
DRV10983 0x26 0x88
DRV10983 0x27 0x90
DRV10983 0x28 0xA9
DRV10983 0x29 0x49
DRV10983 0x2A 0x5
DRV10983 0x2B 0xD