Hi,
I am using DRV10983 in my BLDC motor driver project.
I have below issues ,Please help to resolve.
1. I am not able to tune my motor using DRV10983EVM as it is not working i am tuning it through EEPROM registers (0x20:0x2B). While tuning motor using DRV10983EVM GUI there is an error message : lvclass: read register.vi<ERR> reading register not successful!!
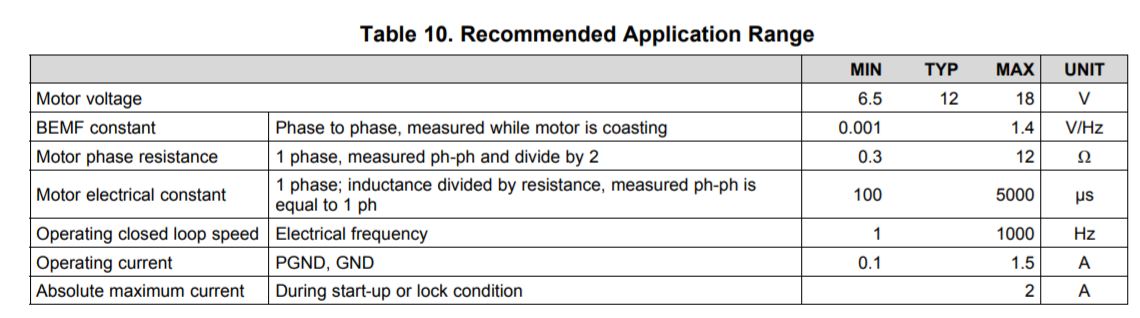
My Power supply is more than 22V. I First tried with GUI rather than MCU and run the motor. When I use it without Load there is no such kind of error shown but when I use load this error message displayed.
2. I want to run my motor at 300RPM how can i change the RPM and how can i measure RPM. I am using PWM mode. I want to know if i have value for example 300rpm then what i need to change.
Please help here.
Thanks
Regards
Rahul