


Hi team,
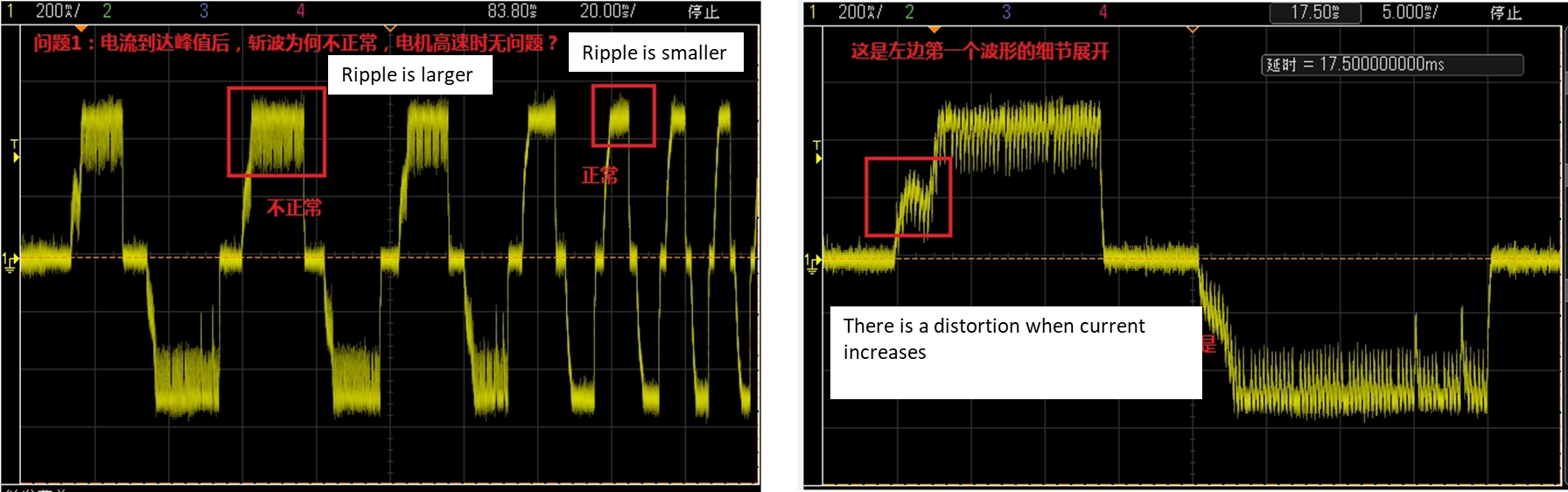
My customer is using DRV8833 to drive s stepper motor in full step mode. The VM=7.7V and the full scale current is set to 500mA. When the motor is in operation, we found that the current ripple in low speed period is larger than the ripple in high speed period. Please see below picture for the waveform.
In the left picture, when the step frequency is low, the current ripple is large. When the step frequency becomes higher, the current ripple becomes smaller.
Do you have any advice on what causes the larger ripple in low speed period?
What's more, when we amplify the waveform, we found that there's a distortion when the current increases as the right picture shows. Do you have any advice on this issue?
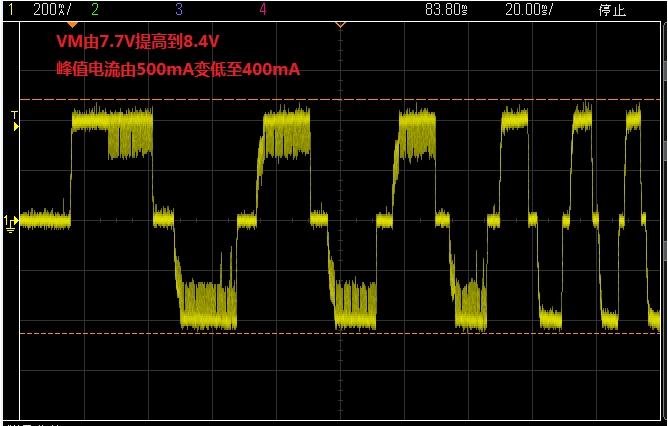
What's more, We tried to increase the VM to 8.4V and reduce full scale current to 400mA. But the issue still exists. please see below waveform. So this issue may be not related to the VM or the full scale current value. Hope this is helpful to you. Thanks.
Best regards,
Wayne
