Other Parts Discussed in Thread: USB2ANY
Hi,
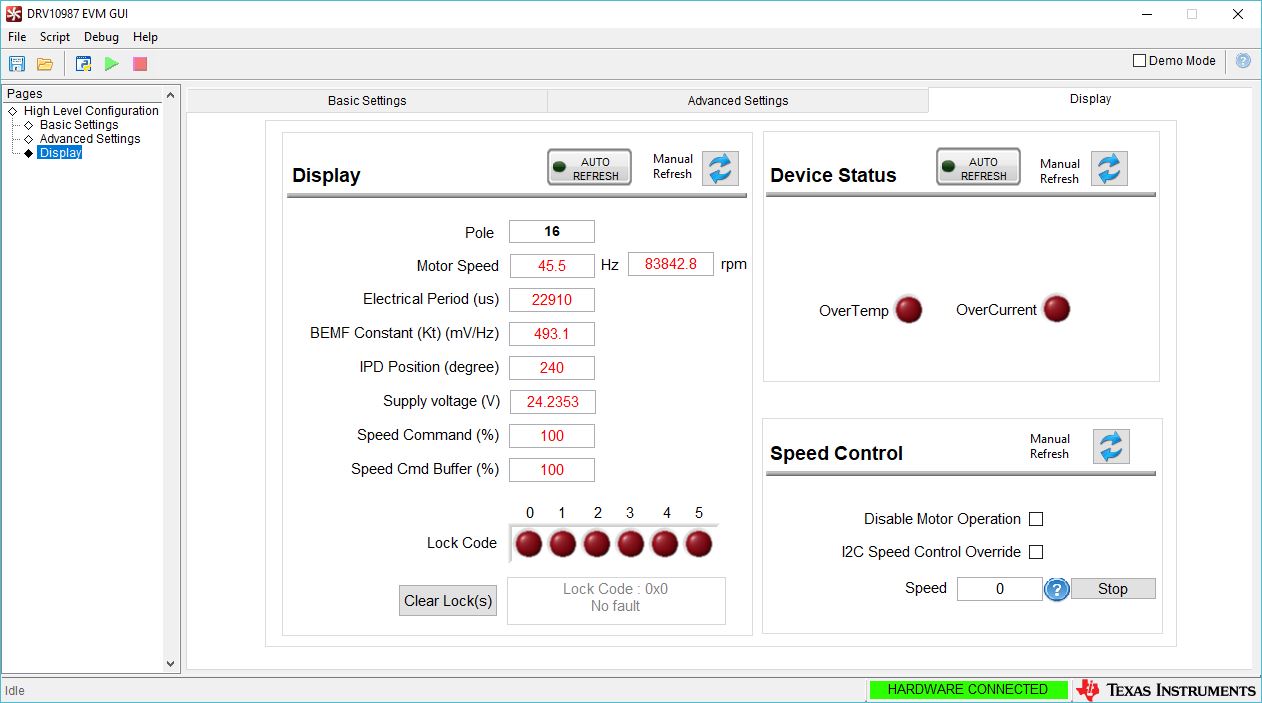
I am using DRV10987 EVM. I am trying Tuning the BLDC Fan Motor.
The Motor Parameters are:
Rph = 1.26 ohm /ph
Lph = 6.75 mH/ph
Kt = 400 mV/Hz
The Configuration file I have is attached below.
I have 2 issues:
1) First of all, although I am able to run the motor, the motor runs at full speed (for any input value) or zero speed (for 0 input) through the USB2ANY I2C via DRV GUI, but no speed control by either GUI or PWM or Analog Methods resp.
2) Secondly, the motor start up takes time, it turns ON and OFF couple of times and then ultimately turns ON completely and runs at full speed after 40 seconds. I am using Initial Speed Detect and Initial Position Detect. So some start up delay is expected but is it possible to minimize the same.
Please suggest suitable measures to have a minimum starting time and smooth speed control
Thanks,
PratikTI_com_param.cfg