6Poles-HengDrive BLDC Actural Performance Curve(9S6PN10)-B2838M-12VDC-SOF-180328-006A.pdf
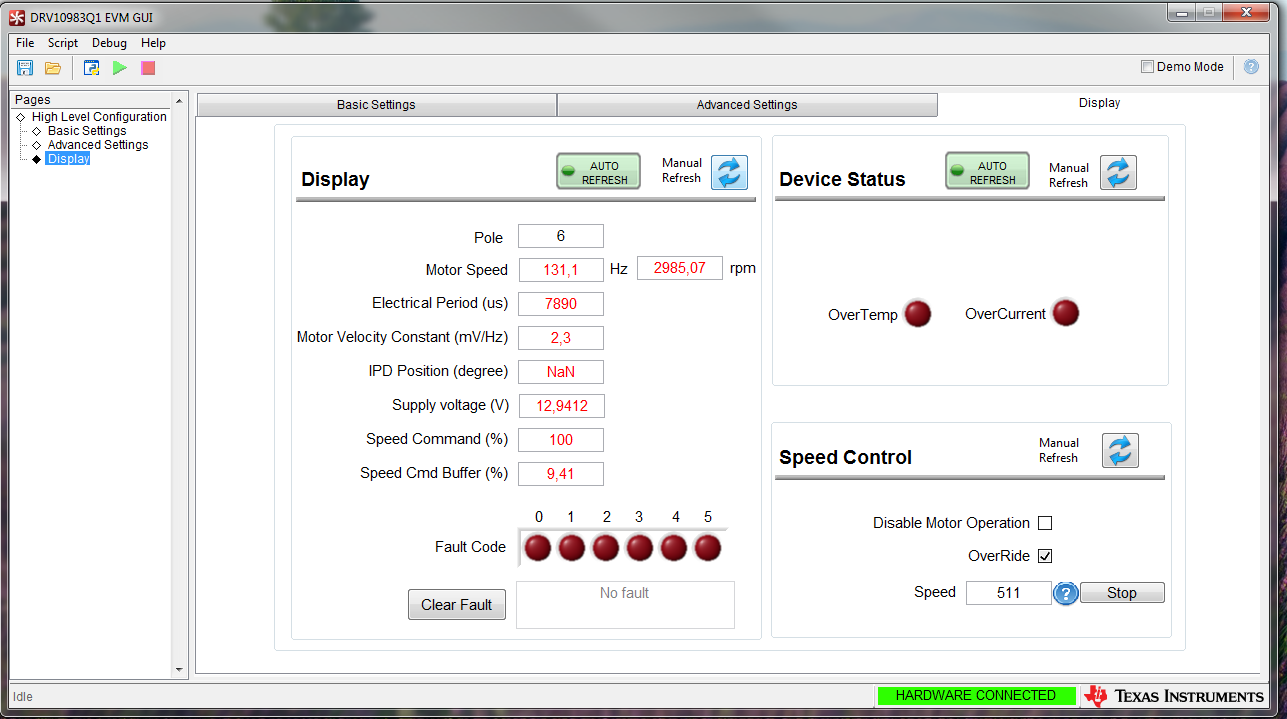
Hi, I'm trying your driver but I can not configure the engine parameters correctly. I can not close the ring and if I can, the bldc motor has no torque.
The motor datasheet is attached.
Thank you