Hello TI Community,
I have a BLDC motor whose parameters are typically as following :
Phase resistance = 1.44Ohms (tolerances ==> R = Min. 2.59 Ohm / Max. 3.17 Ohm)
Phase to Phase Kt = 39mV/Hz (tolerances ==> Kt = Min 34,8mV/Hz / Max 43.2mV/Hz)
The lookup tables for DRV10987 allow me to set as nearest values for :
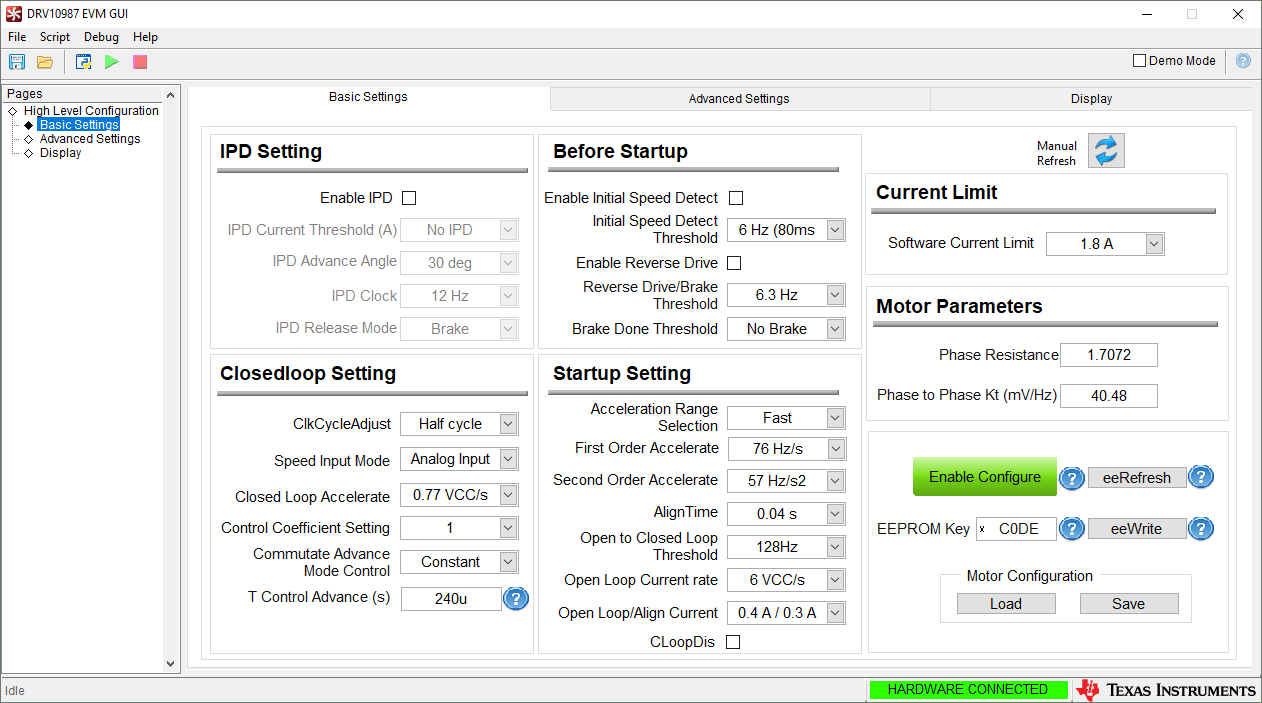
Phase resistance = ... / 1.2416 / 1.3968 / 1.552 / 1.7072 / ... (Table 3 page 22 of datasheet)
Phase to Phase Kt = ... / 33.12 / 36.8 / 40.48 / 44.16 / 47.84 / ... (Table 4 page 24 of datasheet)
So is this DRV10987 driver suitable for my motor knowing that I cannot exatly make the looktable settings match perfectly to my motor's parameters ?
Can one give me an percentage of tolerance for those two parameters seen from his knowledges/experimentations in BLDC motor driving ?
I have several pieces of the same blower and I face stall effects while using the same driver with the same settings and I have to adjust each time the driver for a precise blower.
Best Regards,
Marc