Dear SIr,
I have a some question for working DRV10983.
1. DRV10983EVM can control motor speed to change BEMF value per frequency?
1. DRV10983EVM can control motor speed to change BEMF value per frequency?
2. I checked to work for using (DRV10983EVM + our motor).
but it occurred fault.3 error(no motor) for our board.
but it occurred fault.3 error(no motor) for our board.
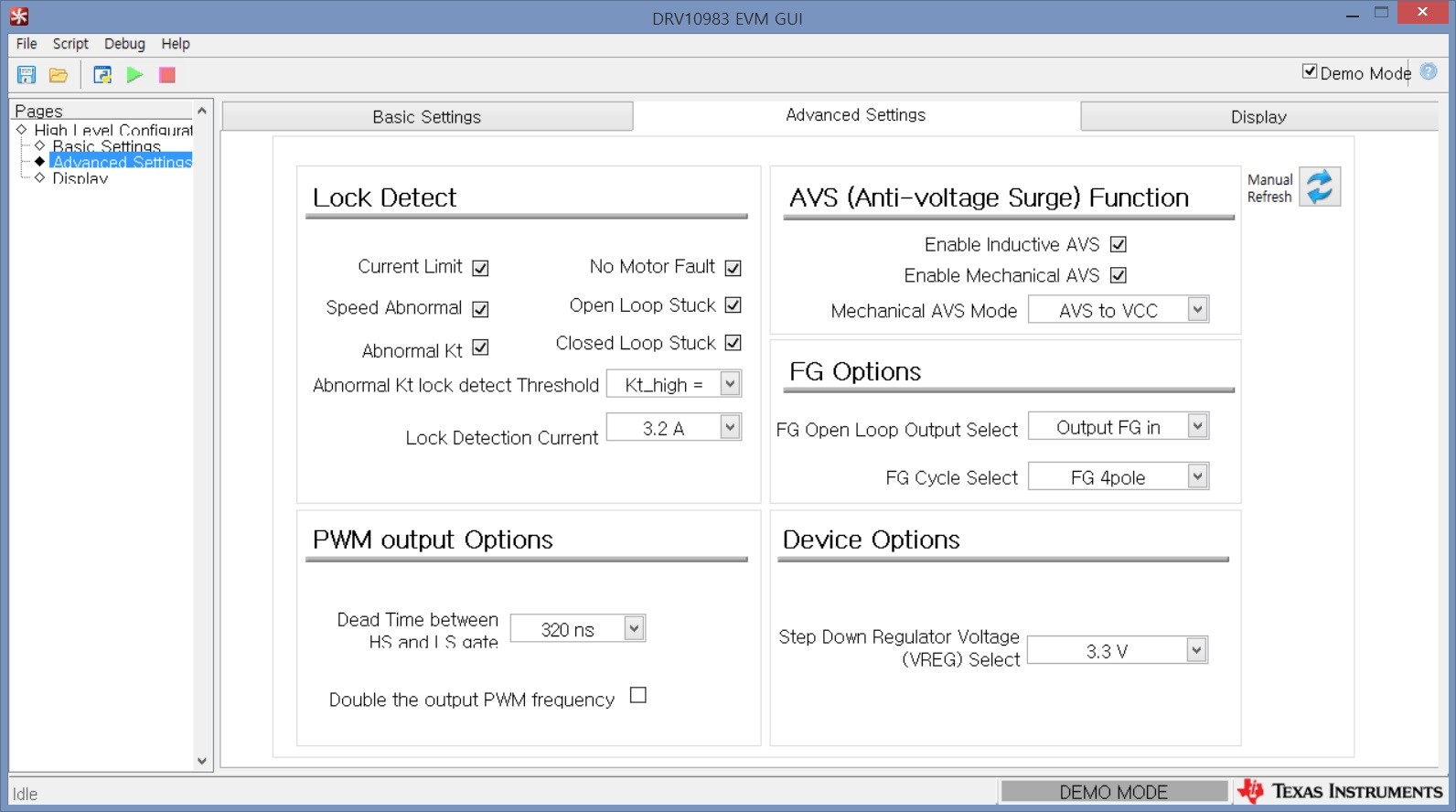
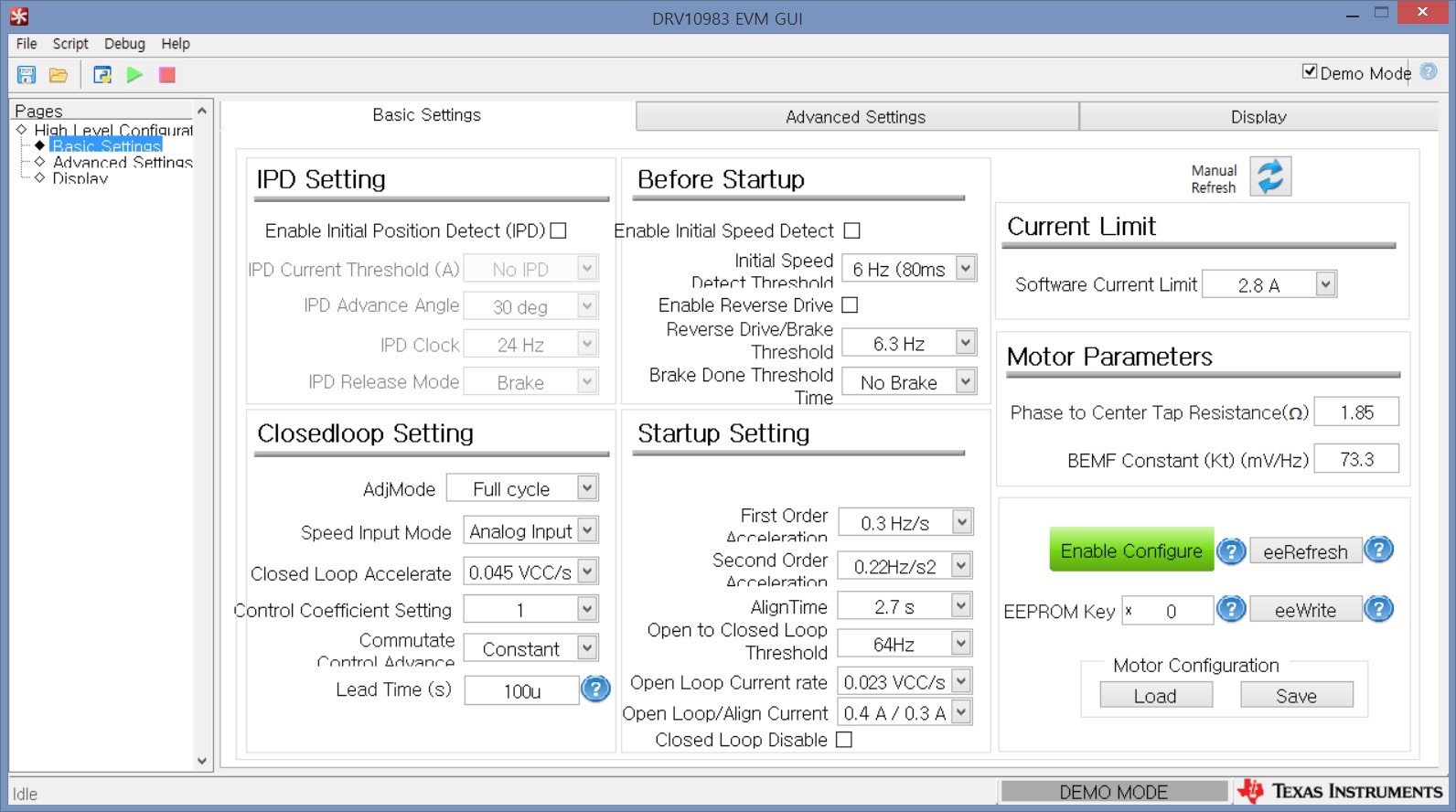
could you please check below code, what is problem.
==================================================================
#include "stm32f7xx_hal.h"
#define DRV10983_I2C_PORT hi2c2
#define DRV10983_I2C_ADDR 0xA4
#define SPEED_CNTL_ANALOG 0
#define SPEED_CNTL_PWM 1
#define SPEED_CNTL_I2C 2
#define SPEED_CNTL_PWM 1
#define SPEED_CNTL_I2C 2
#define REG_LOCK 0
#define REG_UNLOCK 1
#define REG_UNLOCK 1
//Register Address
#define SpeedCtrl1 0x00
#define SpeedCtrl2 0x01
#define DevCtrl 0x02
#define EECtrl 0x03
#define SpeedCtrl1 0x00
#define SpeedCtrl2 0x01
#define DevCtrl 0x02
#define EECtrl 0x03
#define Status 0x10
#define MotorSpeed1 0x11
#define MotorSpeed2 0x12
#define MotorPeriod1 0x13
#define MotorPeriod2 0x14
#define MotorKt1 0x15
#define MotorKt2 0x16
#define MotorSpeed1 0x11
#define MotorSpeed2 0x12
#define MotorPeriod1 0x13
#define MotorPeriod2 0x14
#define MotorKt1 0x15
#define MotorKt2 0x16
#define IPDPosition 0x19
#define SupplyVoltage 0x1A
#define SpeedCmd 0x1B
#define SpdCmdBuffer 0x1C
#define FaultCode 0x1E
#define SupplyVoltage 0x1A
#define SpeedCmd 0x1B
#define SpdCmdBuffer 0x1C
#define FaultCode 0x1E
#define MotorParam1 0x20
#define MotorParam2 0x21
#define MotorParam3 0x22
#define MotorParam2 0x21
#define MotorParam3 0x22
#define SysOpt1 0x23
#define SysOpt2 0x24
#define SysOpt3 0x25
#define SysOpt4 0x26
#define SysOpt5 0x27
#define SysOpt6 0x28
#define SysOpt7 0x29
#define SysOpt8 0x2A
#define SysOpt9 0x2B
#define SysOpt2 0x24
#define SysOpt3 0x25
#define SysOpt4 0x26
#define SysOpt5 0x27
#define SysOpt6 0x28
#define SysOpt7 0x29
#define SysOpt8 0x2A
#define SysOpt9 0x2B
extern I2C_HandleTypeDef DRV10983_I2C_PORT;
uint32_t drv10983_control_init(void);
uint32_t drv10983_i2c_write(uint8_t reg_addr,uint8_t reg_value);
uint32_t drv10983_i2c_read(uint8_t reg_addr,uint16_t *reg_value,uint8_t length);
uint32_t drv10983_speed_control_mode(uint8_t mode);
uint32_t drv10983_lock_mode(uint8_t mode);
uint32_t drv10983_i2c_write(uint8_t reg_addr,uint8_t reg_value);
uint32_t drv10983_i2c_read(uint8_t reg_addr,uint16_t *reg_value,uint8_t length);
uint32_t drv10983_speed_control_mode(uint8_t mode);
uint32_t drv10983_lock_mode(uint8_t mode);
====================================================================
#include "drv10983.h"
uint8_t speed_mode = 0x00;
uint32_t drv10983_control_init(void)
{
HAL_StatusTypeDef i2c_ack;
uint32_t ack_sum = 0;
{
HAL_StatusTypeDef i2c_ack;
uint32_t ack_sum = 0;
ack_sum += drv10983_lock_mode(REG_UNLOCK);
HAL_Delay(10);
ack_sum += drv10983_speed_control_mode(SPEED_CNTL_PWM);
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam1, 0x4C); //{0x20,0x49}4C
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam2, 0x2E); //{0x21,0x2A}3A
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam3, 0x2A); //{0x22,0x2A}2A
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt1, 0x00); //{0x23,0x00}00
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt2, 0x78); //{0x24,0xF8}78
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt3, 0xFF); //{0x25,0xFF}FF
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt4, 0xA1); //{0x26,0x99}A1
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt5, 0xFC); //{0x27,0xFC}FC
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt6, 0xEF); //{0x28,0xAD}EF
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt7, 0xF7); //{0x29,0xF7}E7 E9
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt8, 0x0D); //{0x2A,0x0D}0D
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt9, (0x0C + speed_mode) ); //{0x2B,0x0D}0C
HAL_Delay(10);
HAL_Delay(10);
ack_sum += drv10983_speed_control_mode(SPEED_CNTL_PWM);
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam1, 0x4C); //{0x20,0x49}4C
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam2, 0x2E); //{0x21,0x2A}3A
HAL_Delay(10);
ack_sum += drv10983_i2c_write(MotorParam3, 0x2A); //{0x22,0x2A}2A
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt1, 0x00); //{0x23,0x00}00
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt2, 0x78); //{0x24,0xF8}78
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt3, 0xFF); //{0x25,0xFF}FF
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt4, 0xA1); //{0x26,0x99}A1
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt5, 0xFC); //{0x27,0xFC}FC
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt6, 0xEF); //{0x28,0xAD}EF
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt7, 0xF7); //{0x29,0xF7}E7 E9
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt8, 0x0D); //{0x2A,0x0D}0D
HAL_Delay(10);
ack_sum += drv10983_i2c_write(SysOpt9, (0x0C + speed_mode) ); //{0x2B,0x0D}0C
HAL_Delay(10);
return ack_sum;
}
uint32_t drv10983_i2c_write(uint8_t reg_addr,uint8_t reg_value)
{
HAL_StatusTypeDef i2c_ack;
i2c_ack = HAL_I2C_Mem_Write(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
return i2c_ack;
}
{
HAL_StatusTypeDef i2c_ack;
i2c_ack = HAL_I2C_Mem_Write(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
return i2c_ack;
}
uint32_t drv10983_i2c_read(uint8_t reg_addr,uint16_t *reg_value16,uint8_t length)
{
HAL_StatusTypeDef i2c_ack;
uint8_t reg_value;
if(length == 1)
{
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
*reg_value16 = reg_value;
return i2c_ack;
}
else if(length == 2)
{
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
*reg_value16 = reg_value << 8;
HAL_Delay(10);
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr+1,1,®_value,1,10);
*reg_value16 += reg_value;
return i2c_ack;
}
else
return 0xff;
}
{
HAL_StatusTypeDef i2c_ack;
uint8_t reg_value;
if(length == 1)
{
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
*reg_value16 = reg_value;
return i2c_ack;
}
else if(length == 2)
{
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr,1,®_value,1,10);
*reg_value16 = reg_value << 8;
HAL_Delay(10);
i2c_ack = HAL_I2C_Mem_Read(&DRV10983_I2C_PORT,DRV10983_I2C_ADDR,reg_addr+1,1,®_value,1,10);
*reg_value16 += reg_value;
return i2c_ack;
}
else
return 0xff;
}
uint32_t drv10983_speed_control_mode(uint8_t mode)
{
HAL_StatusTypeDef i2c_ack=0;
{
HAL_StatusTypeDef i2c_ack=0;
if(mode == SPEED_CNTL_I2C)
i2c_ack = drv10983_i2c_write(SpeedCtrl2, 0x80);
else
i2c_ack = drv10983_i2c_write(SpeedCtrl2, 0x00);
i2c_ack = drv10983_i2c_write(SpeedCtrl2, 0x80);
else
i2c_ack = drv10983_i2c_write(SpeedCtrl2, 0x00);
if(mode == SPEED_CNTL_PWM ) speed_mode = 0x02;
else speed_mode = 0x00;
else speed_mode = 0x00;
return i2c_ack;
}
}
uint32_t drv10983_lock_mode(uint8_t mode)
{
HAL_StatusTypeDef i2c_ack=0;
if(mode == REG_UNLOCK)
i2c_ack = drv10983_i2c_write(EECtrl, 0x40);
else
i2c_ack = drv10983_i2c_write(EECtrl, 0x00);
{
HAL_StatusTypeDef i2c_ack=0;
if(mode == REG_UNLOCK)
i2c_ack = drv10983_i2c_write(EECtrl, 0x40);
else
i2c_ack = drv10983_i2c_write(EECtrl, 0x00);
return i2c_ack;
}
}