Other Parts Discussed in Thread: CONTROLSUITE
Hello,
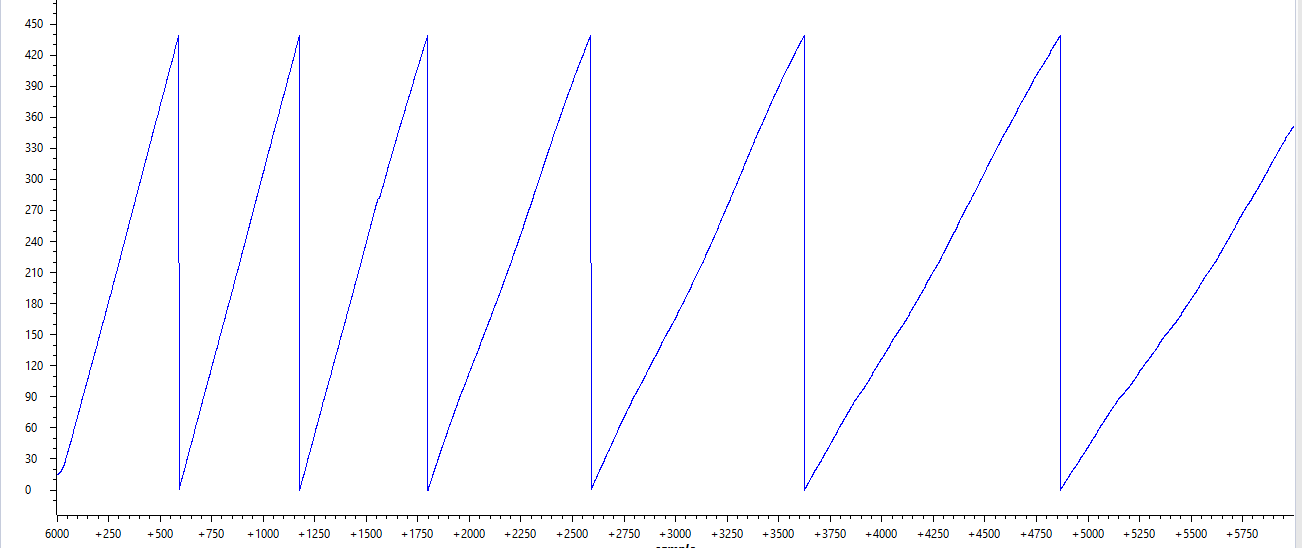
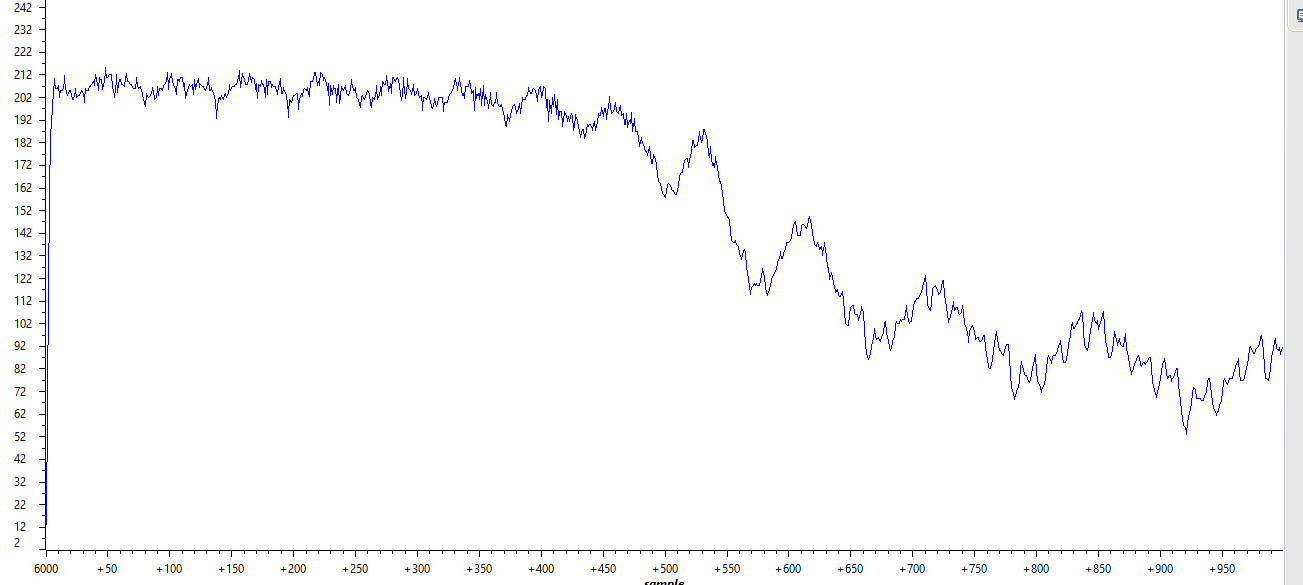
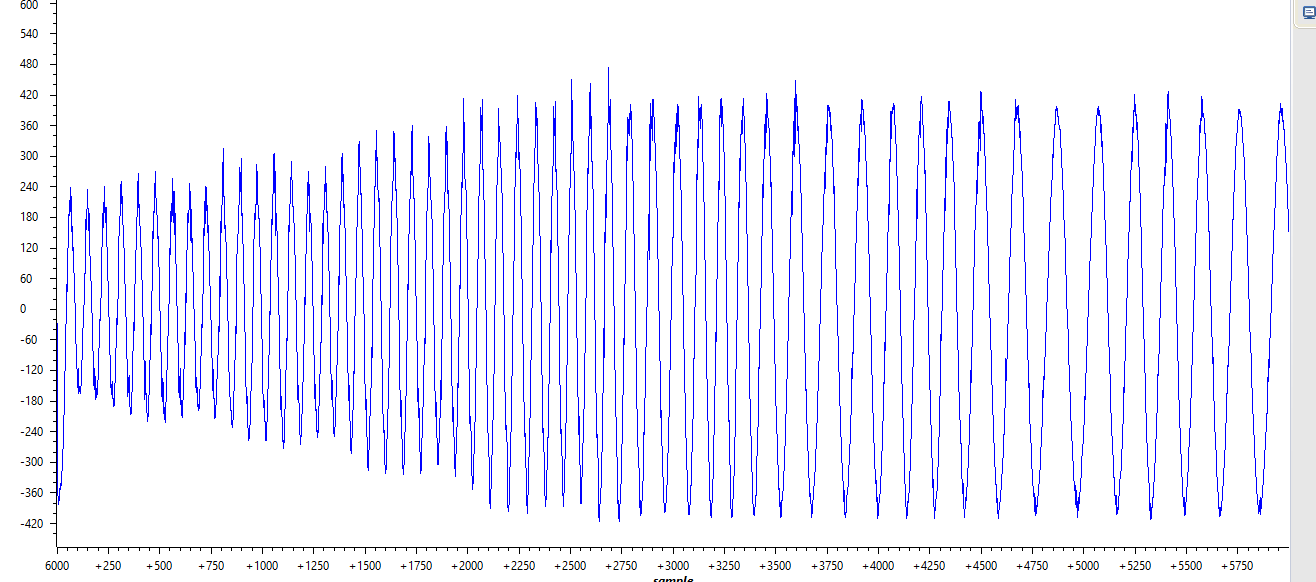
I am using sensored FOC method for controlling BLDC motor. In current loop,when I set the d axis current to zero and q axis current to something below the rated value, the motor starts to rotate and after few second the speed of motor began to decrease and finally the motor stops. when I look at the current of motor, it is constant and suddenly began to increase. so I want to know why it is happening?
Regards,
Mohammad.