Other Parts Discussed in Thread: DRV10983-Q1
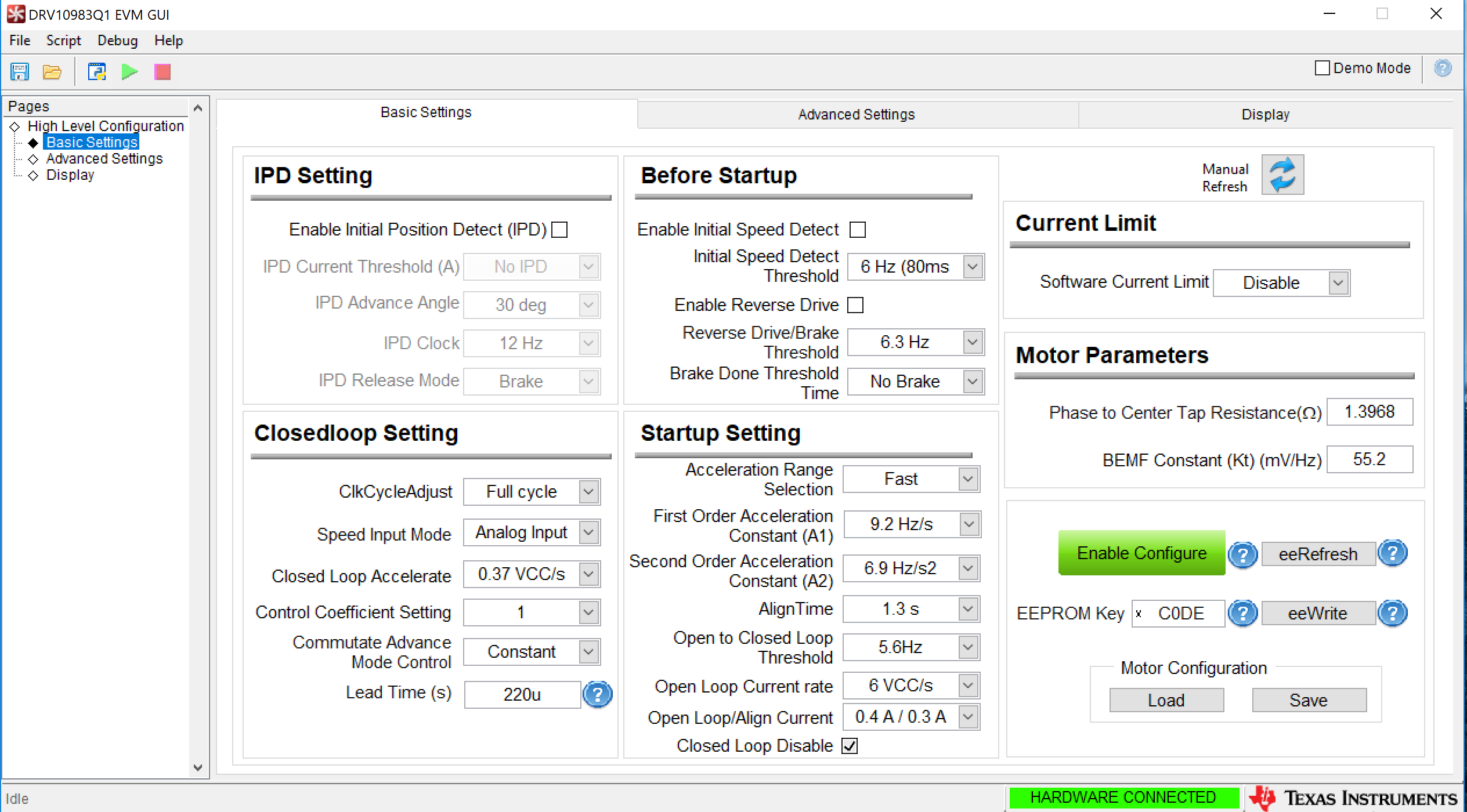
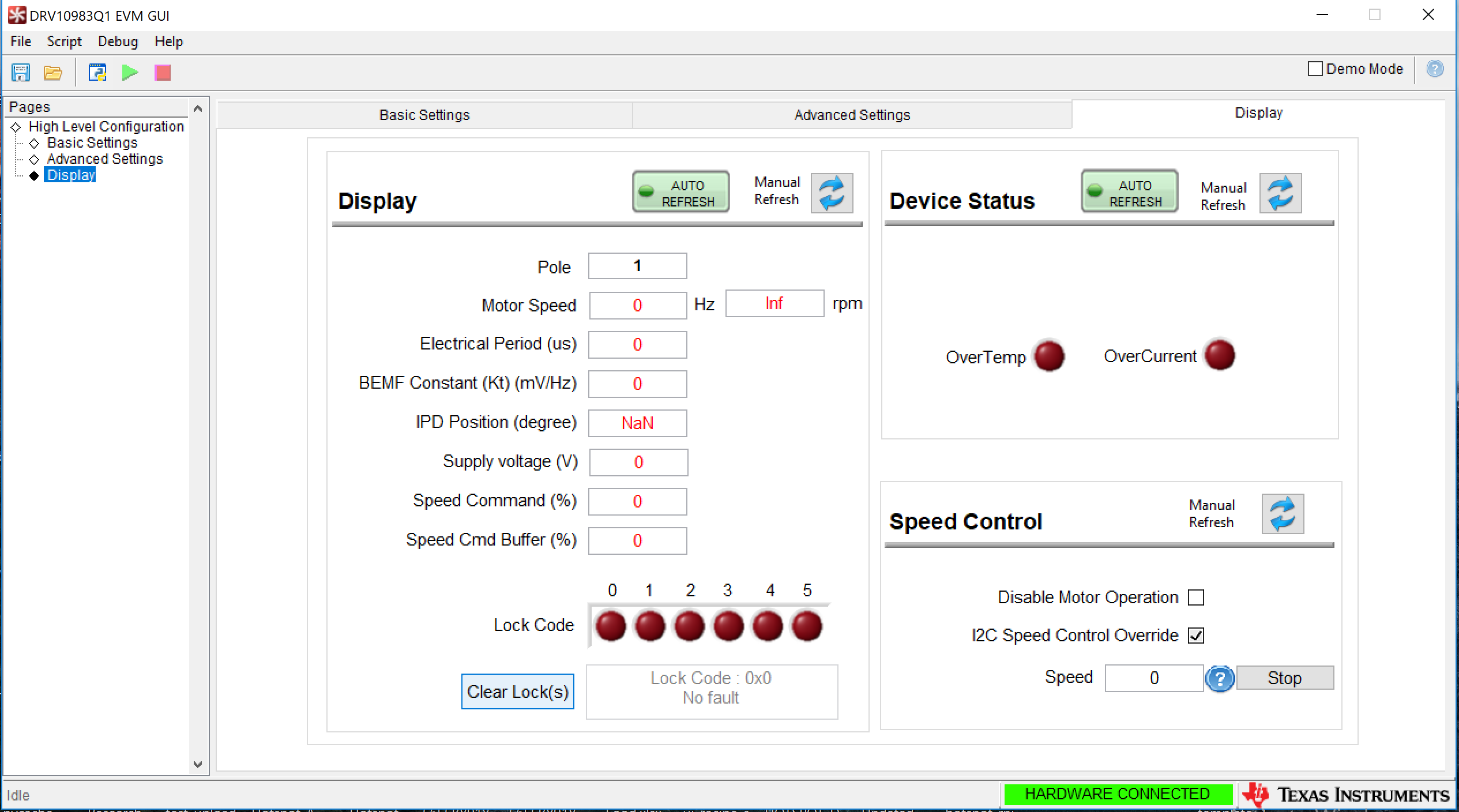
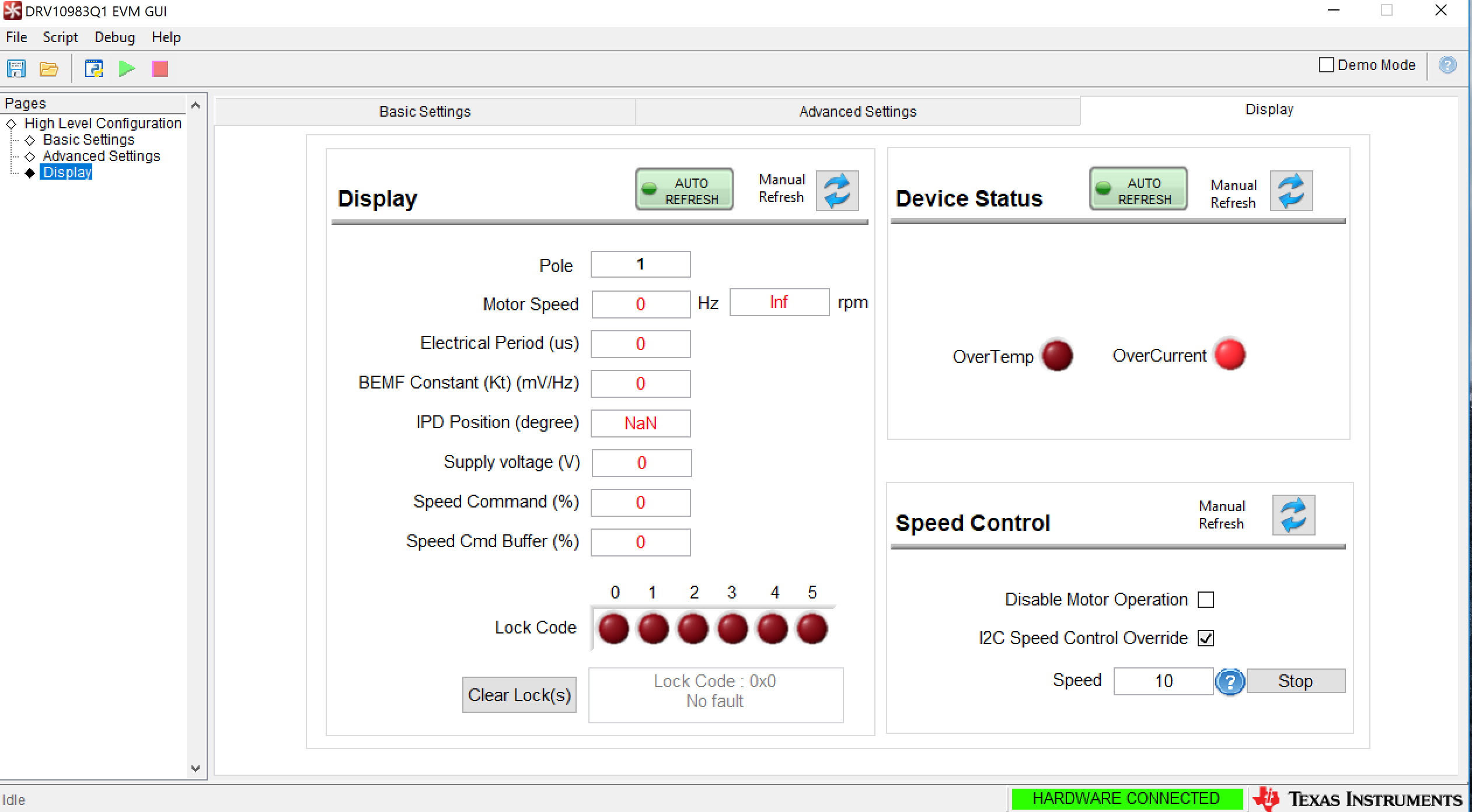
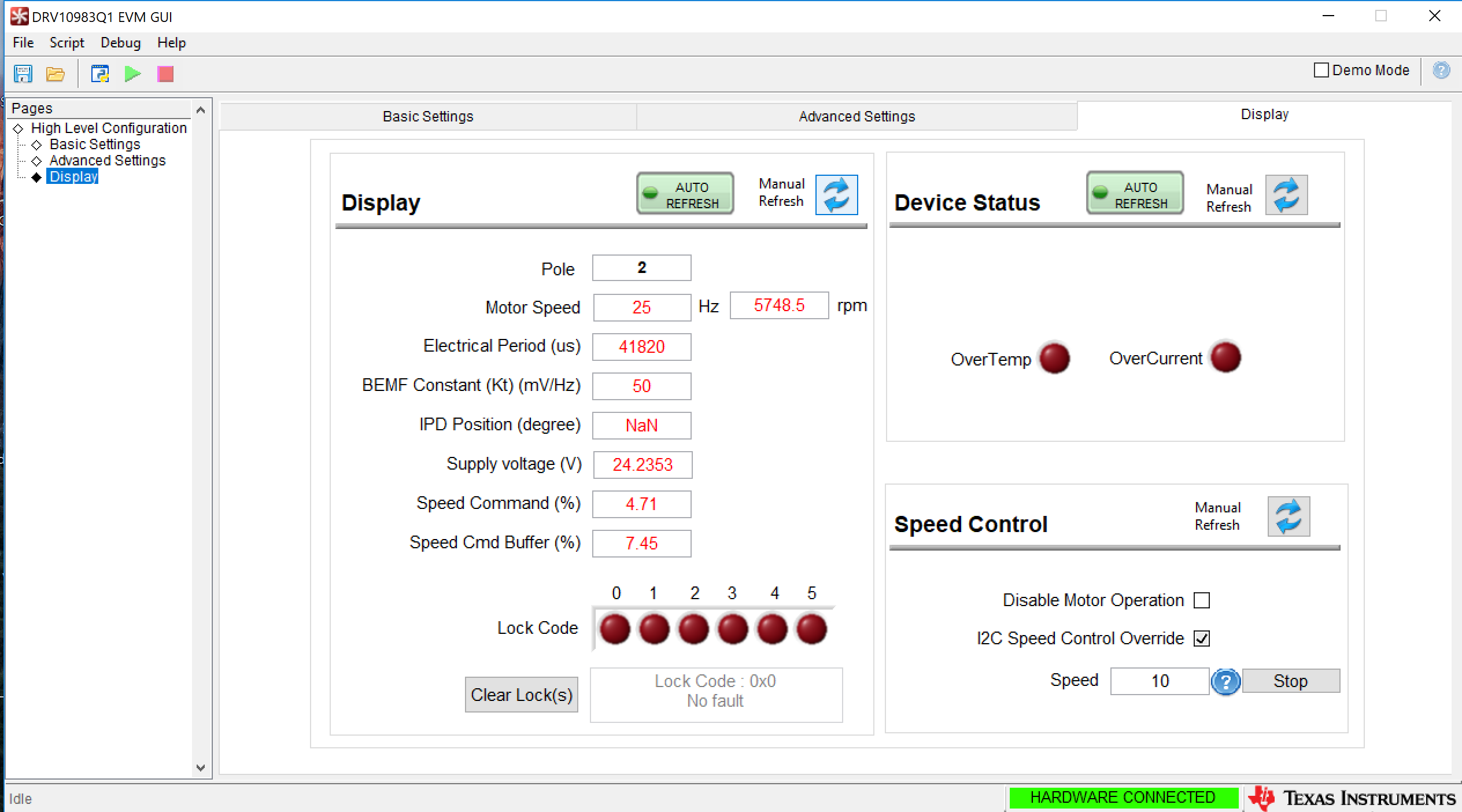
Hi there, I purchased the DRV10983Q1 EVM and after looking at the display tab of the GUI, the values seem to be incorrect (for example its displaying the supply voltage as 0V even though I measured it at the supply pin as 24V). I am unable to upload to the EEPROM, I just get an error saying that the EEPROM is not ready. After looking at the I2C SDA pin I can see that I am sending commands but not receiving anything back from the DRV10983-Q1.
I also tried just setting a speed without anything connected and I get an overcurrent fault. Not too sure what the issue is.
A few other notes: I am using windows 10 on Parallels (Macbook). The draw from the power supply is 24V and 0.007A