Hi Team,
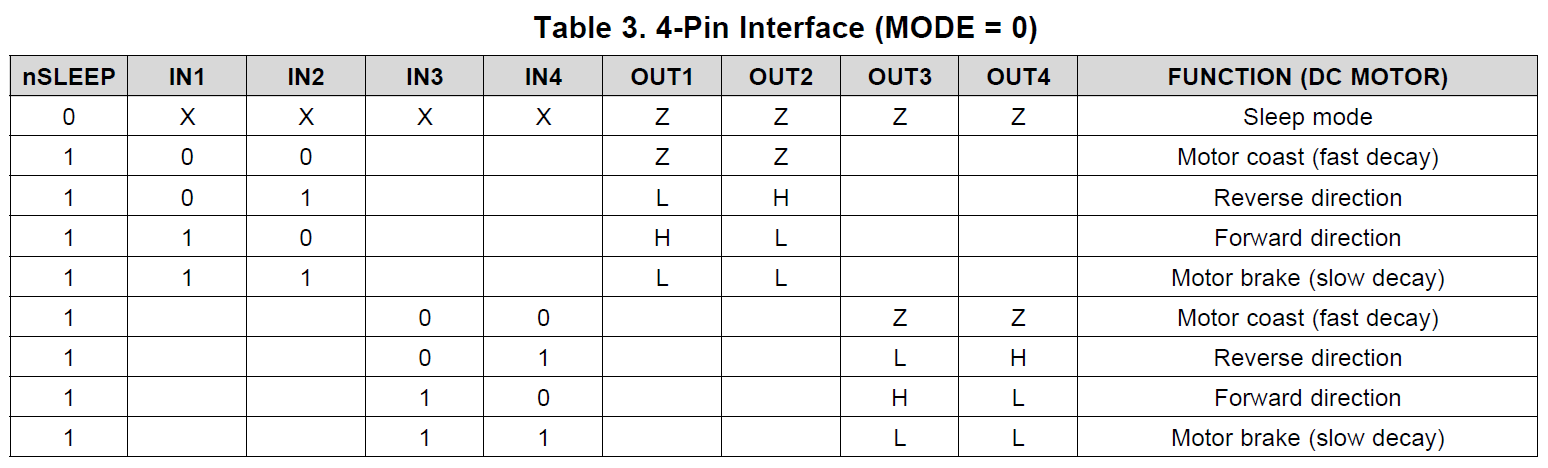
A customer is planning to use DRV8847S for dual BDC motor in 4-wire mode and applying PWM signals to the input pins for speed control. He wants to connect IN2 to GND and then apply a PWM signal to IN1 in order to control the speed of the motor. To reverse the motor and control the speed he wants to connect IN1 to GND and then apply PWM signal to IN2. Is this possible?
Regards,
Danilo