Other Parts Discussed in Thread: C2000WARE, DRV8301, MOTORWARE
Hey TI - I am hoping you can help me understand the current control signals.
I am running the LAUNCHXL-280049C development board with the BOOSTXL-DRV8320RS inverter. I am using C2000Ware_MotorControl SDK 3.00.01.00 on CCS V9.3.0.00012.
I am driving a small 3phase, BLDC blower (MOOG BSB19-16BN-04CS) and am currently experimenting with lab 7 (is07_speed_control). I have not modified the code and am using motor parameters generated in lab 5. The inertia value was provided by Moog.
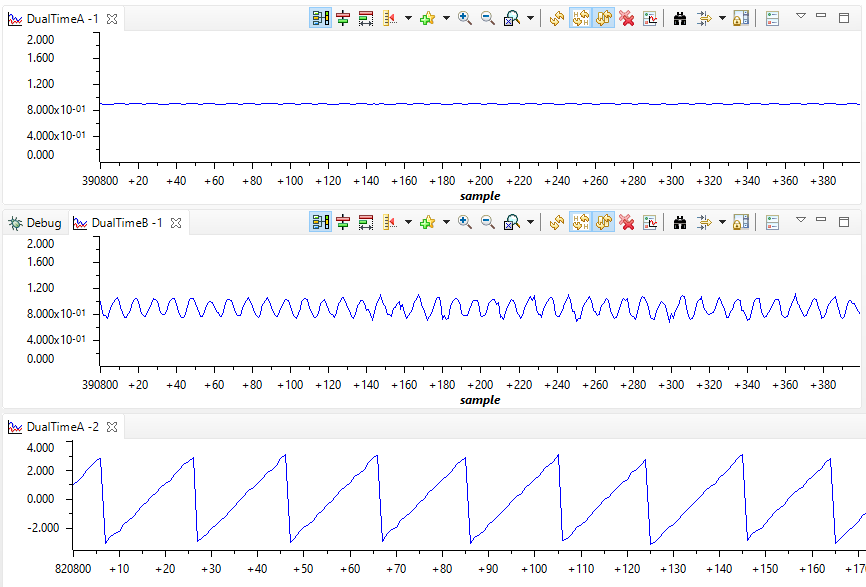
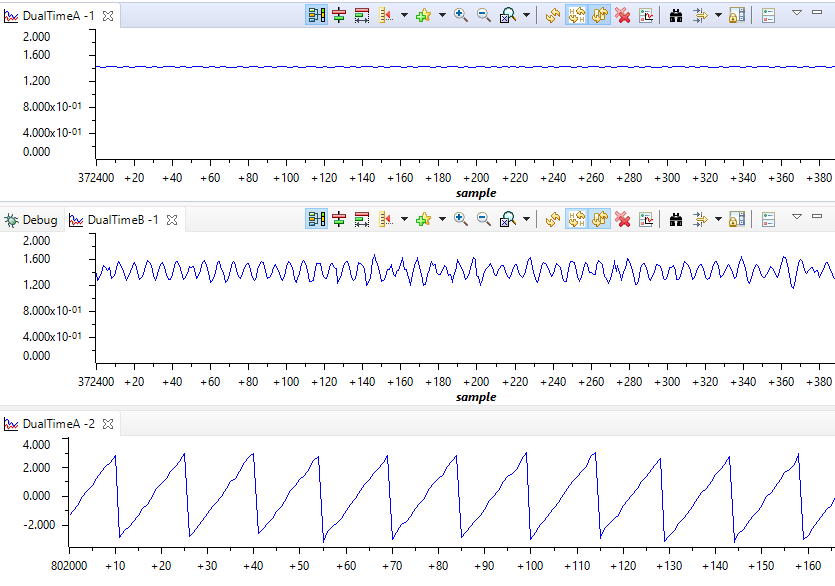
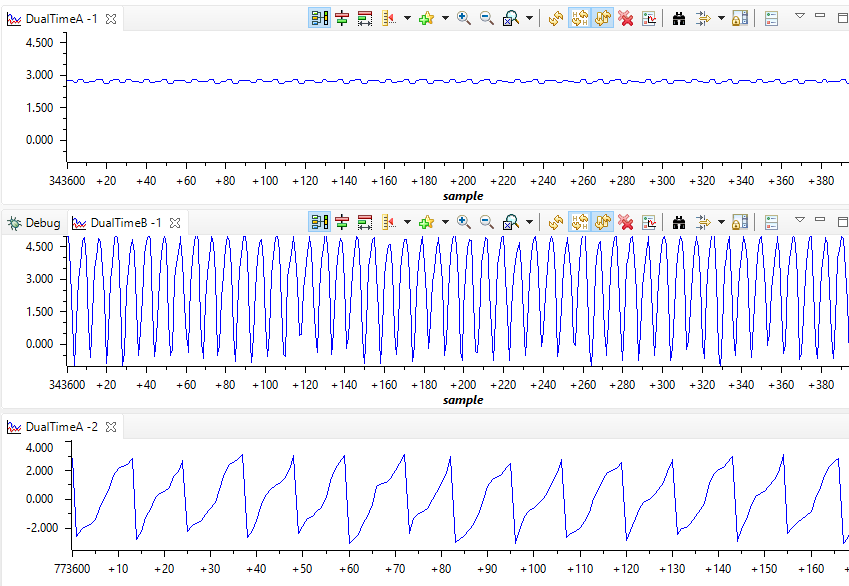
I am using the datalog to capture Idq_ref_A.value[1] (Iq_ref) and Idq_in_A.value[1] (Iq_in). And am graphing both.
OK. So everything works fine up to 400Hz on the speed reference. And by fine I mean both Iq_ref and Iq_in are both stable and Iq_in tracks to Iq_ref. But once I get above some threshold value of speed reference (450Hz in this case), Iq_ref goes to ~ 2.7A and seems stable while Iq_in starts oscillating from just under 0 A to almost 5A. See screen shot below where Iq_ref is on DualTimeA and Iq_in is on DualTimeB.
My power supply reads 24V, 1A so I know it is not limiting, etc.
I could understand if Iq_ref started oscillating (indicating a control problem) but not Iq_in.
As a side note - Iq_in oscillates if I use the Park transform to calculate Iq_in or if I use the estimator to get Iq_in.
Any thoughts on why this is happening?
Thanks!
Brett