Other Parts Discussed in Thread: DRV10987, MSP430G2553, DRV10983-Q1
Dear technical engineer, I am a FAE Intern of Ti. In the process of using drv10987evm, there are two questions:, I hope to consult the corresponding engineers。
Question 1:Difference between "FOC" and "sinusoidal control" in operation efficiency and noise of BLDC motor.
Question 2:The reason of serious phase current harmonic when "open-loop to closed-loop switching frequency" is low.
About Question 1:
Taking drv10987 as an example, BLDC motor driver chip belongs to sinusoidal control. Now another common control method of BLDC motor is FOC. At present, we hope to understand the difference between FOC and sinusoidal control (taking drv10987 as an example) in the operation efficiency, noise level, torque ripple and dynamic response speed of BLDC motor. Our current application goals are simple BLDC motor applications such as fans and air purifiers. We need to explain the performance differences between FOC and sinusoidal control in BLDC motor drive to give customers a more objective application evaluation.
About Question 2:
First of all, I will briefly explain my experiment:
Motor RPH_CT=0.4Ω,Kt=63.568mV/Hz,4000RPM,24VDC,polar logarithm=8。
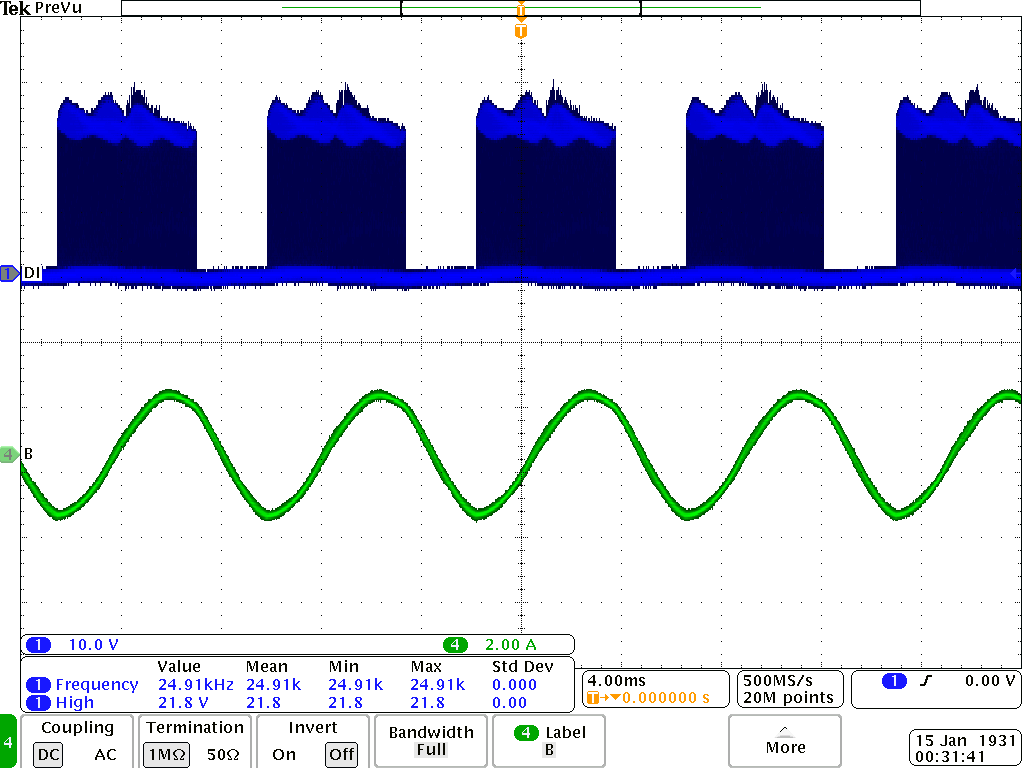
According to the setting suggestion in Drv10987 Tuning Guide document, the open to closed loop threshold should be selected as one third to one fifth of the maximum motor speed, in this case, it is 106hz-177hz. Therefore, the setting value of open to closed loop threshold in this example is 128Hz. The experimental results are consistent with the description in the document. The waveforms of phase current and phase voltage are shown in the figure below.
In practical applications, customers may also want to try a lower threshold so that the motor can ramp faster from zero to full speed. This is because the motor accelerates faster in a closed loop. When we set the switching threshold to less than one fifth of the maximum speed, and we observe the waveform of the phase current. Now let's take specific examples:

We set the open to closed loop threshold to 12.8hz, 25.6hz, 38.4hz, 64Hz, 76.8hz and 128Hz.When the threshold value of threshold is reduced, the harmonic in phase current will be more serious. At the same time, the switching failure from open-loop to closed-loop may occur when the threshold value is low. This is mainly because the equipment triggers the current protection due to the sudden increase of current during the switching process. Here we do not want to argue about the harm of low threshold, but try to analyze why low threshold will lead to current waveform distortion in open-loop state, and also want to understand why it is easier for equipment to switch to closed-loop state unsuccessfully in this case.
The above is my question, thank you for your reading, welcome to exchange.