Hi.
I have a question about DRV8833 deadband.
I'm driving VCM using DRV8833 at carrier frequency of 90kHz.
VM (motor power supply voltage) is 4V.
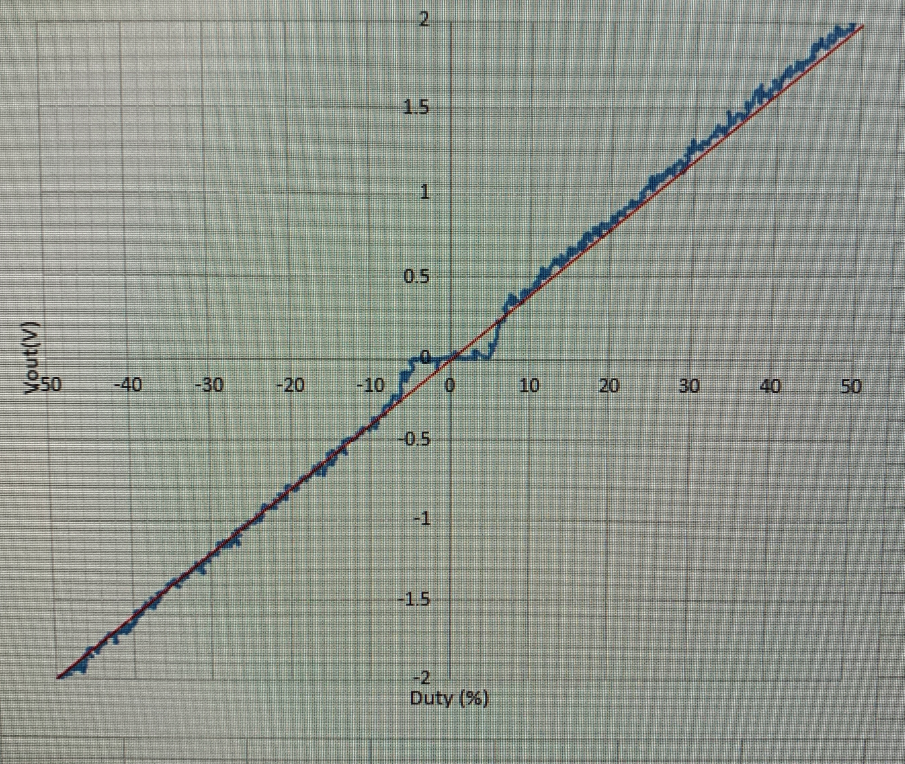
And I confirmed that there is a dead band when the duty is in range of ±3%.
At 90kHz, duty 3% is equivalent to 333ns in time.
From From the specification, summing of Tr(rise time) and Tf (fall time) is 180ns+160ns=340ns.
Although it is different from the measurement conditions in the specification, this time is almost the same as the time width at duty 3%.
My question are,
#1. Dead band will occur at a duty that is less than the time width of sum of Tr and Tf?
#2. Is there a motor driver with a short time of Tr and Tf?
#3. Is there a way to compensate the dead band in software without changing the carrier frequency?