Other Parts Discussed in Thread: LAUNCHXL-F280049C, , C2000WARE-MOTORCONTROL-SDK, INA240
I'm using LAUNCHXL-F280049C + BOOSTXL-DRV8320RS kit and running through InstaSPIN-FOC guide examples from C2000WARE-MOTORCONTROL-SDK v3.00.01.00.
When working with is08_overmodulation example (or higher) i meet stability problems because of OVM code, even with USER_MAX_VS_MAG_PU = 0.50. Without OVM code, everything works fine.
I experimented with different scenarios, for example the most radical one:
USER_MAX_VS_MAG_PU = 0.50
minWidth_usec = 5.0
USER_PWM_FREQ_kHz = 40.0 (+PWM_TICKS_PER_ISR_TICK=2)
resulting in Vlimit of 0.1
If the SVGENCURRENT status changes to TWO_PHASE_MEASURABLE (any of Va, Vb, Vc > Vlimit = 0.1), motor becomes noisy (simple current reconstruction).
if it reaches ONE_PHASE_MEASURABLE, it becomes wobbly (current reconstruction + PWM compensation to VMID).
With normal settings => Vlimit close to 0.45, the ovm effect is stronger and quicker, resulting in overcurrent or power supply error. Iq becomes super spiky.
I tried it in torque mode, omitting speed controller resulting the same problems.
Did anyone had similar problems with OVM and found any problem with SVGENCURRENT or HAL_setTrigger functions?
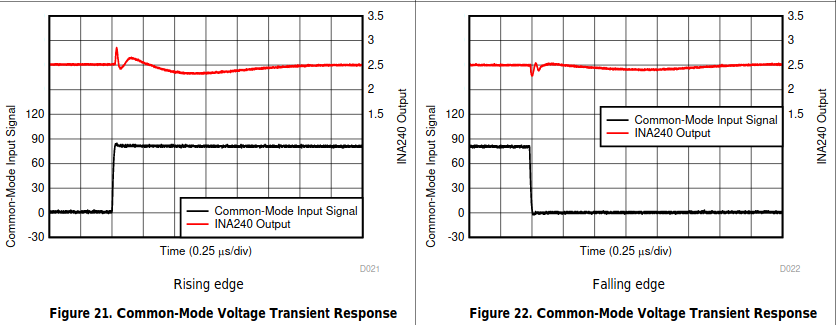
Also, I'm thinking about using INA240 in-line current sensors instead of low-side with PGAs: Do i still need to worry about minimum minWidth_usec for INA240 output settling (~1.25us) or PWM CMR spike and loose supply range? Or rather then i would have to set the trigger accordingly to the settling time, but without modulation limit - up to 0% low-side on time?
And phase voltages don't need to be measured in specific FET state due to its RC filtering (apart from being synchronized with current), right?