Hello,
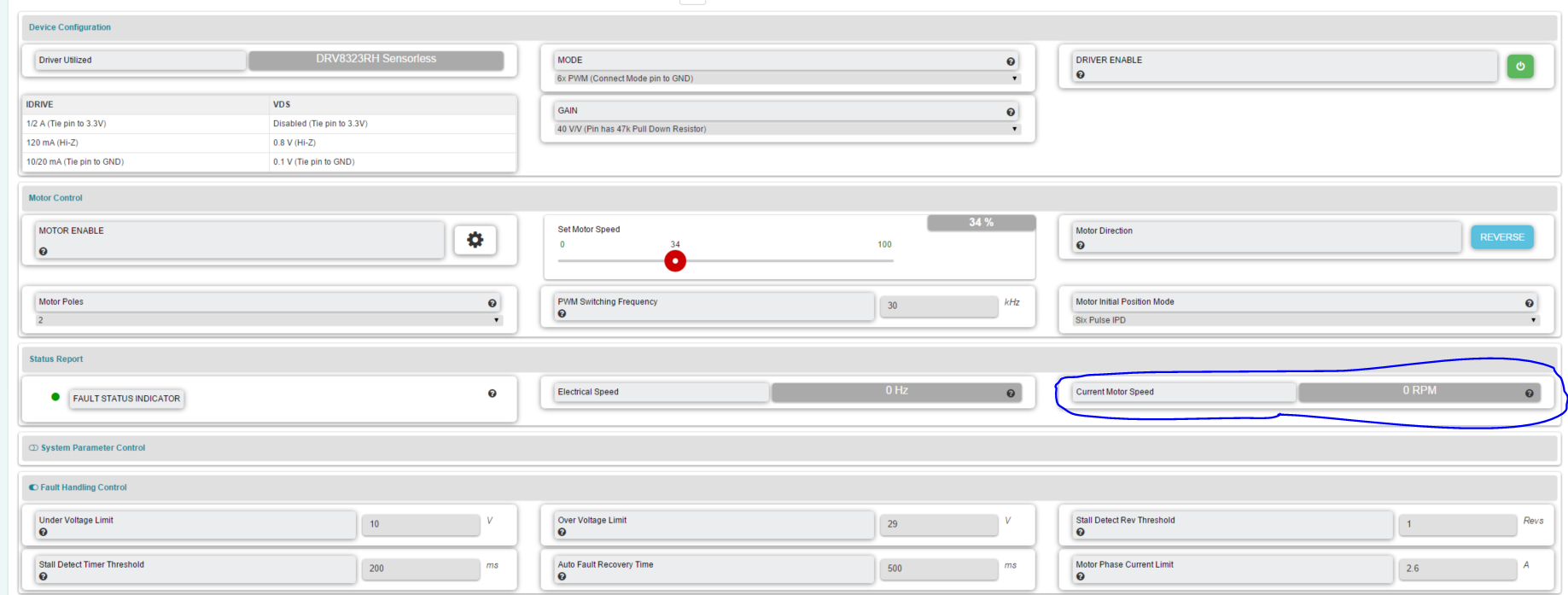
I have a customer who has been working on our DRV8323RH BLDC Board. He is looking to extract the RPM information directly from the device. He would like to measure the RPM outside of GUI. Can you help me to provide instructions for how to do this? Thanks!
-Will