Other Parts Discussed in Thread: DRV8353R, DRV8353, , MOTORWARE
Hi,
There is the description on EVM user's guide shown below:

Questions:
-What's the default firmware version on EVM? Sensored firmware or sensorless? Does it means that if changing to the EVM to 1*PWM mode, sensored firmware and hall sensored input to DRV are mandatory needed?
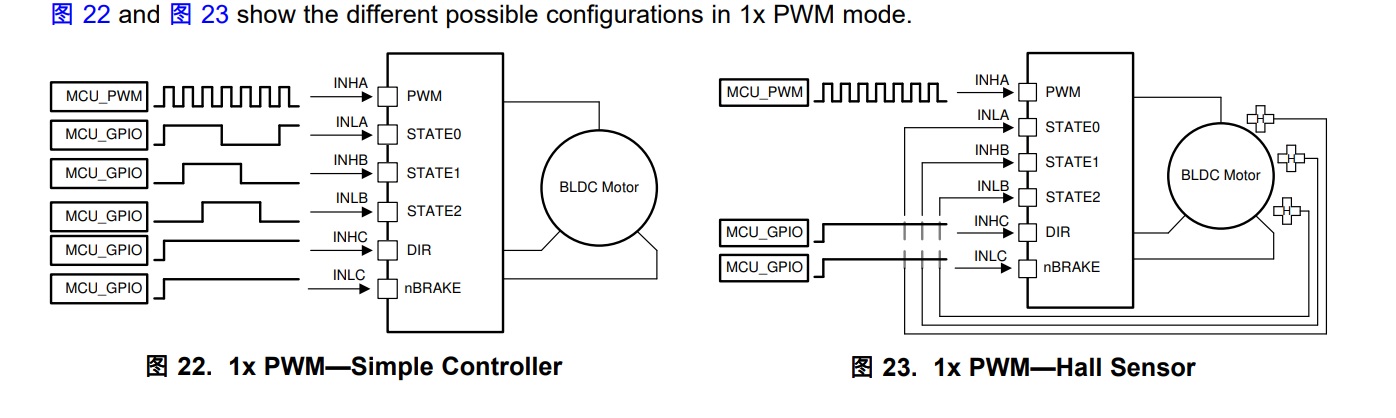
-In datasheet of DRV8353R, it seems that 1*PWM mode could also work with sensorless motor as figure 22?
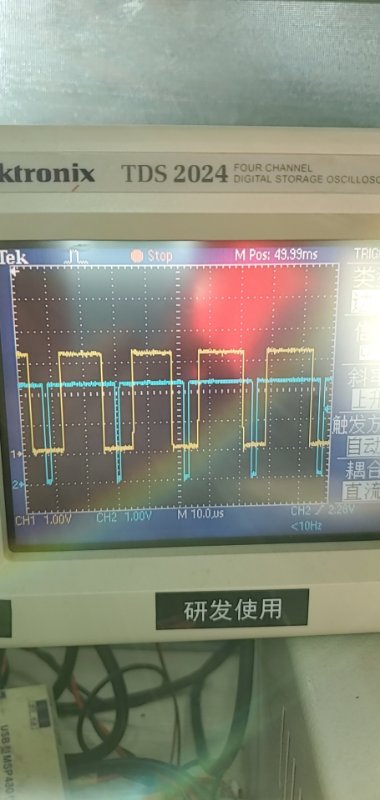
-Does the EVM could work without motor (no load)? I got abnormal INHA, INHB output from the MCU board as shown below. As I only modify the PWM_MODE = 10b with no load test and no hall sensor input at J3.
The INHA is yellow and INHB is blue. The frequency of INHB is the same with INHA, which is different to figure 22.