Other Parts Discussed in Thread: DRV8332, DRV8312, DRV8353
Hi
In our boards evaluation, following phenomenon is occurred.
I would like to ask about gate drive of DRV8353HR.
(Phenomenon)
- If I use PWM frequency 200kHz, less than duty 5%(lass than high time 250ns) , this driver's gate control was not operated.
-Even if a fixed Duty PWM signal is input to INHx. Gate Drive on duty seems to slightly change automatically.
( It is using 3×PWM mode. Since we are doing first evaluation, I am useing with INHA:High, INHB & INHC:Low. I haven't controlled the motor yet.)
(Question)
- Are there any requirement of minimum on duty cycle of PWM?
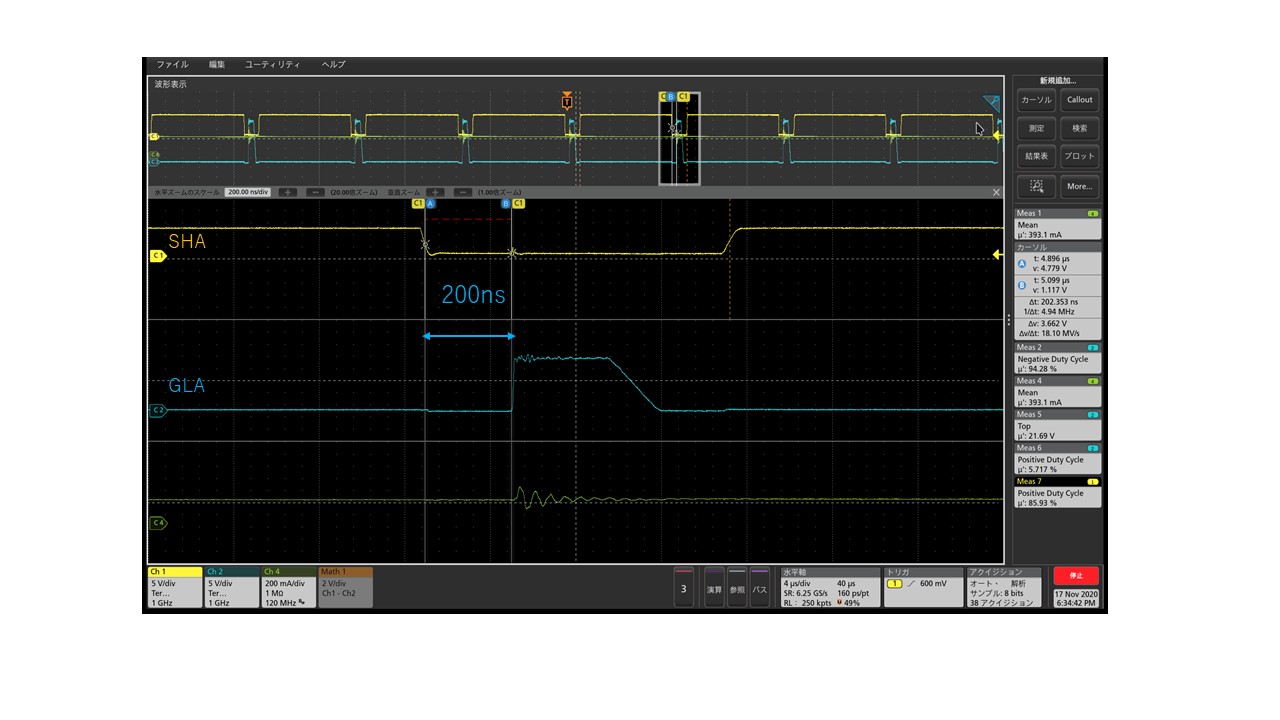
- I checked GLA and SHA signal, it seems deadtime is 200ns,(Attached file )
According to the datasheet, gate drive dead time is 100ns(HW device).
Is this time changed automatically?
- Even if a fixed Duty PWM signal is input to INHx(3×PWM mode). Is gate frive on duty cycle slightly change automatically?
In short, isn't the current value fixed even with a fixed-duty PWM signal input?
Best regards
Naoki