


Hi team,
Can you have a look at my customers question regarding motor current calculation?
I am currently testing the DRV10987 for suitability for our application. I have the chip in operation with the MCU to the point where a motor is rotating.
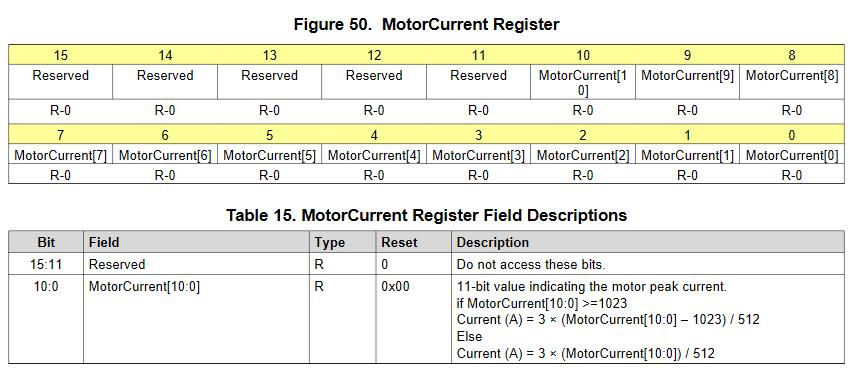
Now I want to optimize the parameters and want to read out the registers. Unfortunately, I do not yet understand how the motor current should be calculated. According to the measurement with current clamp 660 mA pk-pk flow in each phase, the value of the register for the motor current is 0x0413 (). How can I calculate the motor current from this? The description in the data sheet (Rev. C) is not quite conclusive:
Thank you,
Franz
