Hi,Ti
I am now using DRV8823 to control the two-step motor,Now I have the following problem.
1.How to make one motor run and the other motor shut down by register command control?
2.The attachment is the source code that I control the motor operation through registers. Is there any problem?
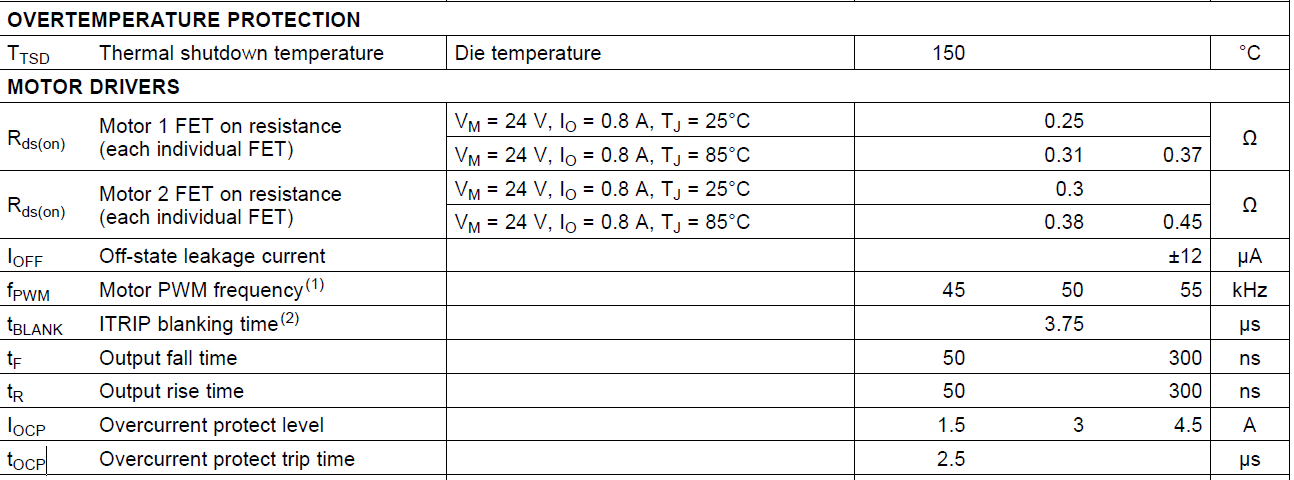
3.What are the overheat protection and overcurrent protection values of DRV8823?Schematic and source screenshots.docx
#include "timer.h"
#include "led.h"
#include "adc.h"
#include "can.h"
#include "step.h"
#include "string.h"
#include "speed.h"
#include "spi.h"
#include "delay.h"
#include "key.h"
uint32_t system_count;
uint32_t sys_event_ms;
uint32_t sys_delay_count;
unsigned char cap_count;
unsigned char five_send_count;
extern unsigned char change_ok;
int cap_state;
uint32_t time_dec,timecount1;
uint32_t cap_val; //����ֵ
uint32_t bicycle_cur_speed; //������ǰ�ٶ�
//float f_count;
//float current_rate;
//unsigned int un_current_rate;
unsigned char cap_flag; //����ɹ���־λ
unsigned int CanTaskCount;
//float final_per_time; //�����Ÿ�֮������ʱ��
extern unsigned char CanSendBuffer[8];
void TIM1_CAP_Init(u16 arr,u16 psc) //���벶������� TIM3_CH4ͨ��
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_ICInitTypeDef TIM1_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //ʹ��GPIOAʱ��
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //�趨�������Զ���װֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //Ԥ��Ƶ��
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
TIM1_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 ѡ������� IC1ӳ�䵽TI1��
TIM1_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //�½���
TIM1_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //ӳ�䵽TI1��
TIM1_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //���������Ƶ,����Ƶ
TIM1_ICInitStructure.TIM_ICFilter = 0x00; //IC1F=0000 ���������˲��� ���˲�
TIM_ICInit(TIM1, &TIM1_ICInitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn; //TIM3�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //��ռ���ȼ�1��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //�����ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_ITConfig(TIM1,TIM_IT_Update|TIM_IT_CC1,ENABLE); //��������ж� ,����CC1IE�����ж�
TIM_Cmd(TIM1,ENABLE); //ʹ�ܶ�ʱ��1
}
void TIM2_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2 );
//��ʼ����ʱ��2 TIM2
TIM_TimeBaseStructure.TIM_Period = arr; //�趨�������Զ���װֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //Ԥ��Ƶ��
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //��ռ���ȼ�1��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //�����ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //��������ж� ,����CC1IE�����ж�
TIM_Cmd(TIM2,ENABLE); //ʹ�ܶ�ʱ��2
}
void TIM4_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
//��ʼ����ʱ��2 TIM4
TIM_DeInit(TIM4);
TIM_TimeBaseStructure.TIM_Period = arr; //�趨�������Զ���װֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //Ԥ��Ƶ��
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM2�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //��ռ���ȼ�1��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //�����ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE); //��������ж� ,����CC1IE�����ж�
TIM_Cmd(TIM4,ENABLE); //ʹ�ܶ�ʱ��2
}
extern VCU_to_MCU_INF vcu_to_mcu_inf;
unsigned char five_send_count;
unsigned char m1_finshed;
unsigned char m2_finshed;
unsigned char H_count;
extern uint32_t self_cheak_count; //�Լ쳬ʱ����
unsigned char CanTestBuffer[8];
uint32_t speed_store[10]; //�ٶ�ֵ�ݴ�
unsigned char speed_store_count;
unsigned char simul_dis_buff[8]; //ģ���DZ��������
short int send_gear;
void TIM2_IRQHandler( void )
{
if(TIM_GetITStatus( TIM2 , TIM_IT_Update ) != RESET)
{
TIM_ClearITPendingBit( TIM2 , TIM_FLAG_Update); //��������жϱ�־λ����һֱ�ж�
sys_event_ms++;
CanTaskCount++;
if( (sys_step==self_cheak_swicth)||Nspeed_update_flag) //û���ٶȸ���
{
self_cheak_count++;
}
//memcpy(CanSendBuffer,(uint8_t *)&motor_status,2);
vcu_to_mcu_inf.control_mcu=motor_status.Gear_change_sta;
if((CanTaskCount%10)==0)
{
Key_return=ReadKeyValue();
if(Key_return & KEY_UP)
{
if(Key_return & PRESS_KEY1) //����1���� //����һ��������־λ ��Ŀ�굵λ
{
if( ( Is_change_gear==0x01) &&( UP_chan_gear_cmd==0)) //��������ʱ������Ӧ�Ӽ�����
{
if( motor_status.Gear_position!=0x04) //����������ʱ����λ��4������Ӧ
{
UP_chan_gear_cmd= 0x01;
will_go_gear= motor_status.Gear_position+1;
}
}
}
if(Key_return & PRESS_KEY2) //����2���� //����һ��������־λ ��Ŀ�굵λ
{
if( ( Is_change_gear==0x01 ) &&( DOWN_chan_gear_cmd==0) ) //���ڽ���ʱ������Ӧ��������
{
if(motor_status.Gear_position!=0x01) //�н�������ʱ����λ��һ������Ӧ
{
DOWN_chan_gear_cmd=0x01;
will_go_gear= motor_status.Gear_position-1;
}
}
}
}
CanSendBuffer[0]=vcu_to_mcu_inf.to_goal_torque; //Ŀ��ת�� //��λ��ǰ ��λ�ں�
CanSendBuffer[1]=vcu_to_mcu_inf.to_goal_torque>>8;
CanSendBuffer[2]=vcu_to_mcu_inf.to_goal_speed; //Ŀ��ת��
CanSendBuffer[3]=vcu_to_mcu_inf.to_goal_speed>>8;
CanSendBuffer[4]=vcu_to_mcu_inf.control_mcu;
CanSendBuffer[5]=motor_status.Gear_position;
CanSendBuffer[6]= vcu_to_mcu_inf.to_mcu_stop|vcu_to_mcu_inf.to_mcu_is_Ngear<<1|vcu_to_mcu_inf.to_mcu_is_drive<<2|\
vcu_to_mcu_inf.to_mcu_brake<<3|vcu_to_mcu_inf.to_mcu_Reversegear<<4|vcu_to_mcu_inf.to_mcu_Forwardgear<<5|\
vcu_to_mcu_inf.to_mcu_mode<<6;
CanSendBuffer[7]=0x00;
Can_Send_Msg_buff(0x0c07f003, CanSendBuffer,8);
//�������ݷ�������
CanTestBuffer[0]=bicycle_cur_speed;
CanTestBuffer[1]=bicycle_cur_speed>>8;
CanTestBuffer[2]=mcu_motor_inf.mcu_speed;
CanTestBuffer[3]=mcu_motor_inf.mcu_speed>>8;
//CanTestBuffer[2]=motor_info[0].motor_steps; //����
//CanTestBuffer[3]=GPIO_ReadInputDataBit( ZERO_POINT2_PORT,ZERO_POINT2_PIN ); //��㿪��
CanTestBuffer[4]= chan_gear_sta;
Can_Send_Msg_buff(0x00000001, CanTestBuffer,5);
}
// if( (sys_event_ms%300)==0) //300msȡһ��ֵ ȡ10��
// {
// if( speed_store_count==10 )
// {
// speed_store_count=0;
// }
// else
// {
// speed_store[speed_store_count] = bicycle_cur_speed;
// speed_store_count++;
// }
// }
if( (sys_event_ms%100)==0) //100ms����
{
send_gear=motor_status.Gear_position*100;
simul_dis_buff[0]= motor_status.Gear_position; //��ǰ��λ
simul_dis_buff[1]= send_gear;
simul_dis_buff[2]= send_gear>>8;
simul_dis_buff[3]= 50 ;
simul_dis_buff[4]= 00;
simul_dis_buff[5]=0x02;
simul_dis_buff[6]= mcu_motor_inf.mcu_torque ; //����ֵ
simul_dis_buff[7]= mcu_motor_inf.mcu_torque>>8 ;
Can_Send_Msg_x(0x02,0x1f,0x00,0x32,0x00,simul_dis_buff,3);
}
if( (sys_event_ms%250)==0) //250ms���� //����ʵ��
{
actual_speed=actual_speed*100;
simul_dis_buff[0]=actual_speed;
simul_dis_buff[1]=actual_speed>>8;
Can_Send_Msg_x(0x02,0x1f,0x00,0x32,0x01,simul_dis_buff,2);
}
}
}
void TIM1_CC_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
{
cap_count++;
}
if(TIM_GetITStatus(TIM1,TIM_IT_CC1)!=RESET)
{
cap_state++;
if( cap_state==1)
{
cap_count=0;
time_dec = sys_event_ms;
}
else if( cap_state== 17 ) //��Ȧ һȦ32���ź�
{
cap_state=0;
timecount1=sys_event_ms;
cap_val=timecount1-time_dec;
cap_flag=1;
// timecount1=0;
// time_dec=0;
// cap_state=0;
// timecount1=TIM_GetCapture1(TIM1);
// if(timecount1>time_dec)
// {
// cap_val=(timecount1-time_dec)/100;
// cap_val=cap_val+cap_count*653;
// cap_val=cap_val/10;
// cap_count=0;
// cap_flag=1;
// }
// else
// {
// cap_val=((0xffff - time_dec)+timecount1)/100;
// cap_count=cap_count-1;
// cap_val=cap_val+cap_count*653;
// cap_val=cap_val/10;
// cap_count=0;
// cap_flag=1;
// }
}
}
TIM_ClearITPendingBit(TIM1, TIM_IT_CC1|TIM_IT_Update);
}
unsigned char timer1_count;
unsigned char count;
unsigned char timer4_count;
unsigned char i;
short int clear_m0=0x0000;
short int clear_m1=0x1000;
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
timer4_count++;
cheak_zero_position();
for(i=0;i<motor_num;i++)
{
if(motor_info[i].motor_num_en==0x01) //���1ʹ��
{
if( motor_info[i].motor_dir==0x01) //������
{
if( motor_info[i].motor_steps!=0) //������Ϊ0
{
SLEEP_HIGH();
if(i==0) //��1�ŵ�� ��ת
{
//command_send(0x0000);
command_send(motor1_ZZ_cmd[motor_info[i].send_count]);
motor_info[i].send_count++;
if(motor_info[i].send_count==0x04)
{
motor_info[i].send_count=0;
motor_info[i].motor_steps--;
}
}
if(i==1) //��2�ŵ�� ��ת
{
// command_send(0x1000);
command_send( motor2_ZZ_cmd[motor_info[i].send_count]);
motor_info[i].send_count++;
if(motor_info[i].send_count==0x04)
{
motor_info[i].send_count=0;
motor_info[i].motor_steps--;
}
}
}
else
{
motor_info[i].motor_num_en=0;
motor_info[i].send_count=0;
motor_info[i].motor_dir=0;
SLEEP_LOW();
motor_info[i].running=0;
}
}
else
{
if( motor_info[i].motor_steps!=0) //������Ϊ0
{
SLEEP_HIGH();
if(i==0) //��1�ŵ�� ��ת
{
// command_send(0x0000);
command_send( motor1_FZ_cmd[motor_info[i].send_count]);
motor_info[i].send_count++;
if(motor_info[i].send_count==0x04)
{
motor_info[i].send_count=0;
motor_info[i].motor_steps--;
}
}
if(i==1) //��2�ŵ�� ��ת
{
// command_send(0x1000);
command_send( motor2_FZ_cmd[motor_info[i].send_count]);
motor_info[i].send_count++;
if(motor_info[i].send_count==0x04)
{
motor_info[i].send_count=0;
motor_info[i].motor_steps--;
}
}
}
else
{
SLEEP_LOW();
motor_info[i].motor_num_en=0;
motor_info[i].send_count=0;
motor_info[i].motor_dir=0;
motor_info[i].running=0;
//motor_info[i].is_find_zero=0;
//motor_info[i].find_zero=0;
}
}
}
}
}
}