



HI Expert
This is similar question to following session.

My customer is using the PWM input mode for IN/TRIG pin configuration.
MODE = 3: PWM input and analog input
N_PWM_ANALOG = 0: PWM Input
The customer found the issue about not stop output signal even if IN/TRIG go down to low.
The time between IN/TRIG low and actual output stop timing is not constant. it is stop by EN low in all cases.
I found similar waveform in the datasheet as below,
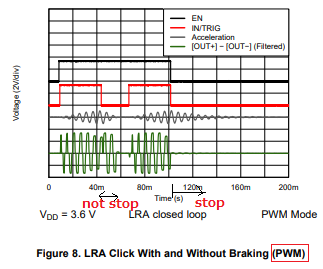
Left is not stopped output signal.
Right can stop output signal by EN low.
Could you please let me know the reason of not stop output signal? Is it due to the braking signal? (from above E2E session)
What parameters will the length of time between IN/TRIG low and actual output stop timing be depend on?
Also, Should we control EN for output stop? or Should we control STANDBY bit for output stop? (< from above E2E session)
Initial setting
Address Value
| 0x01 | 0x0 |
| 0x16 | 0x57 |
| 0x17 | 0x6d |
| 0x18 | 0x8 |
| 0x19 | 0x8b |
| 0x1a | 0xb9 |
| 0x1b | 0x1a |
| 0x1c | 0xf5 |
| 0x1d | 0x84 |
| 0x03 | 0x0 |
| 0x01 | 0x3 |
Thanks
Muk





