The motor doesn't start smoothly and sometimes stops
my code , st mcu
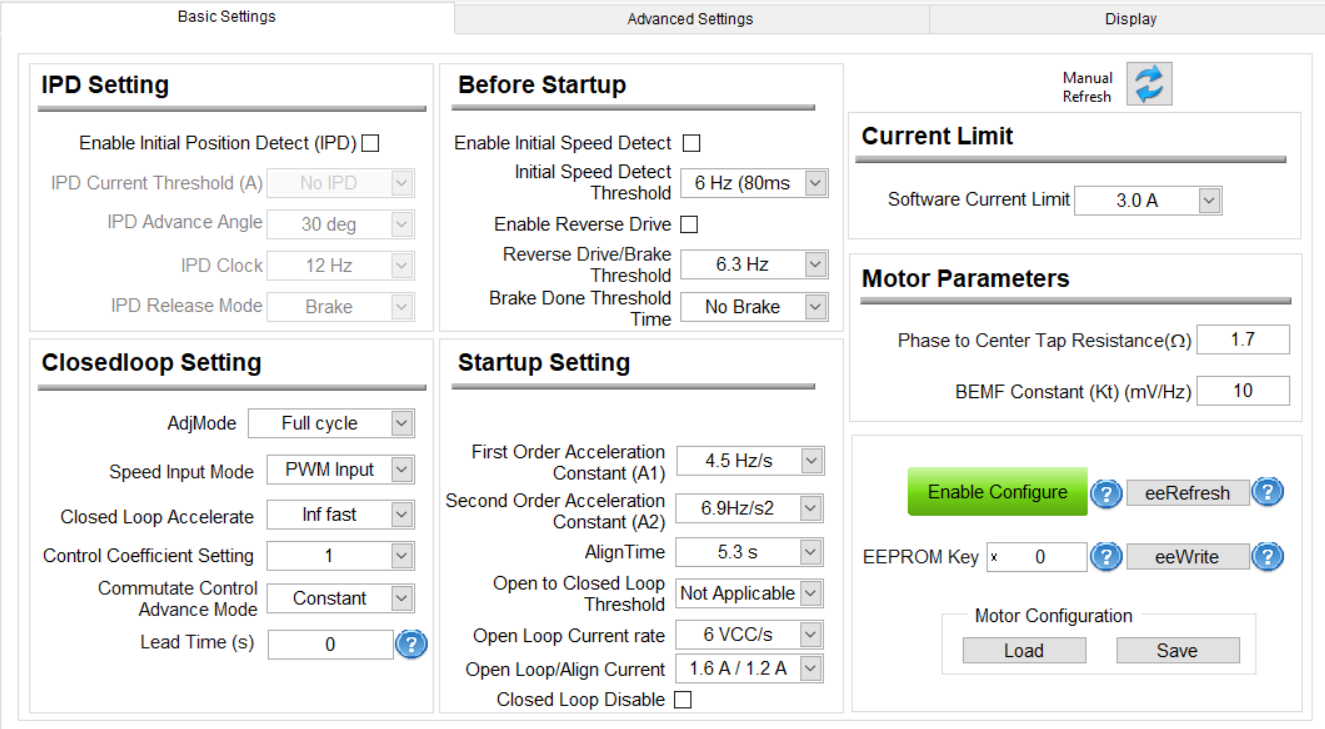
void drv10983_config()
{
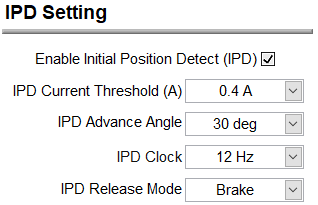
drv10983_write_reg(EE_CTRL, SLEEPDIS|EE_DATA_1); //0x03,0x80|0x40=1100 0000
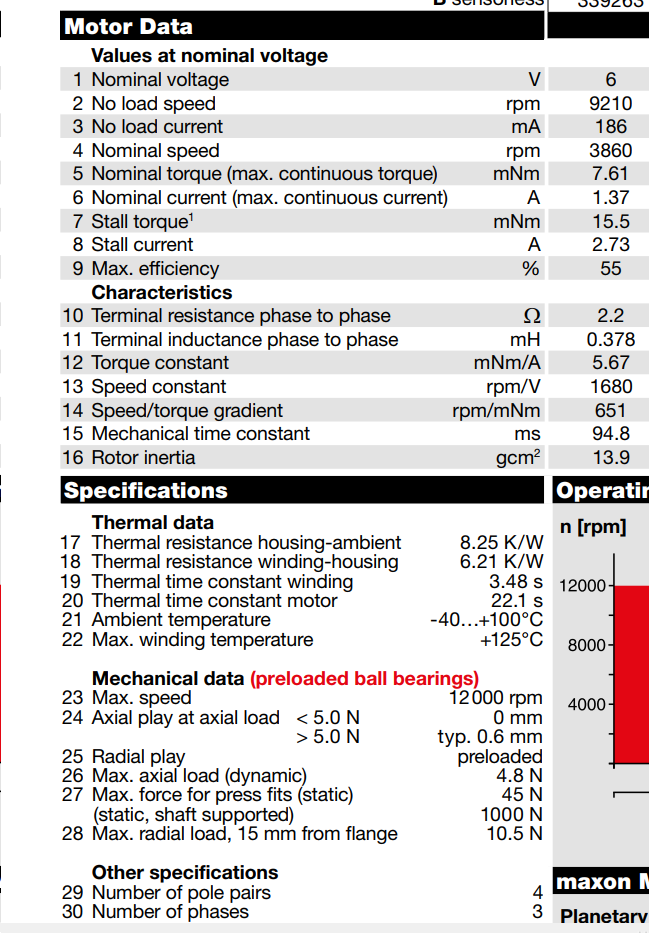
drv10983_write_reg(MotorParam1, DoubleFreq_0|Rm_079); //Write Phase Resistance 0x20,0x00|0x4b µç×è
drv10983_write_reg(MotorParam2, AdjMode_0|Kt_27); //Write Kt 0x21,0x00|0x0b ·´µç¶¯ÊÆ
// drv10983_write_reg(MotorParam3, CtrlAdvMd_1|TCtrlAdv_200us);
drv10983_write_reg(SysOpt2, OpenLCurr_1A6|OpLCurrRt_6|BrkDoneThr_No); //0x24,0xc0|0x00|0x00
drv10983_write_reg(SysOpt3, CtrlCoef_1|StAccel2_69|StAccel_45); //Write Control and Start-up accelerate //0x25,0xC0|0x18|0x04
drv10983_write_reg(SysOpt5, 0xE4); //0x27,
drv10983_write_reg(SysOpt6, 0xFE); //0x28,
drv10983_write_reg(SysOpt7, LockEn5_En|ClsLpAccel_Inf|DeadTime_360s); //0x29,0x80|0x00|0x09=1000 0000 1001
drv10983_write_reg(SysOpt9, 0x0E); //0x2B,
//drv10983_write_reg(SpeedCtrl2, OverRide|SpeedCtrl2Data); //0x01,0x80|0x00
drv10983_write_reg(SpeedCtrl2, 0x00); //0x01,0x80|0x00
drv10983_write_reg(SpeedCtrl1, 0x00); //0x00,0x90
}