Other Parts Discussed in Thread: DRV8353,
Dear Team,
As per the previous explanation on Motor Controller Unit, now we are moving in clear and strong way. So I expect to solve the below mention problem in DRV8353RS EVM.
Now we are just trying to spin the motor using 6 step commutation (square wave generation) by start and stop control function of CHx and CHNx timer functions and not by duty control.
We ensure the input to the gate drive is based on the Hall table and it is working perfect.
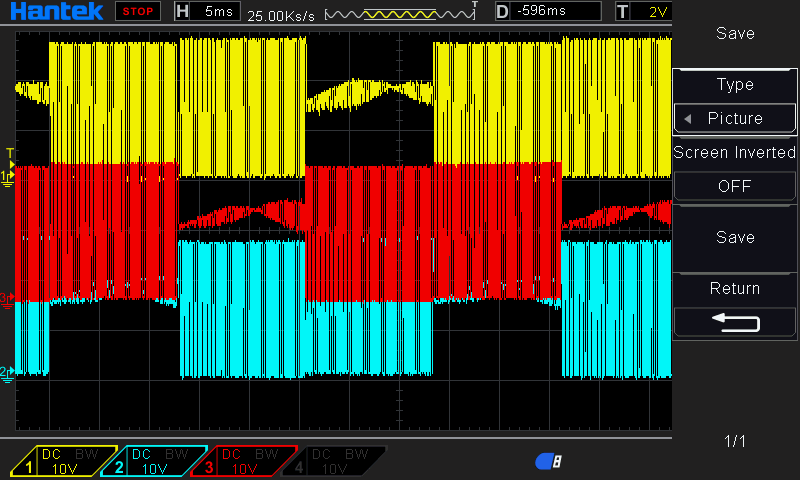
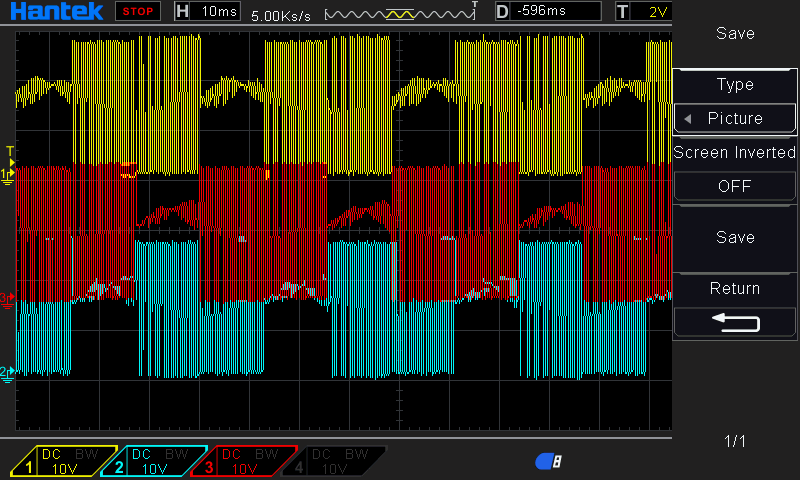
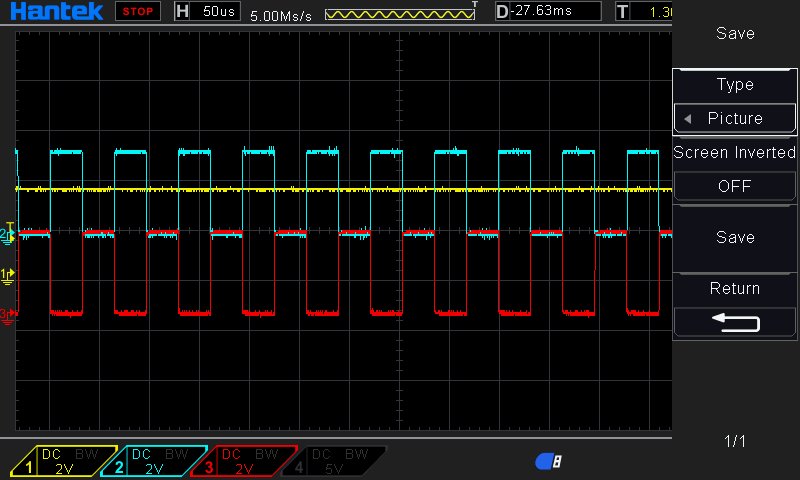
While checking after gate driver all High side are getting enabled.
(for example Hall Position 001 : PHA-OFF, PHB-Negative, PHC-Positive; but actually after gate driver
GHA-ON(just an high state, no square pulse),
GLA-OFF,
GHB-ON (square Pulse),
GLB-ON (square Pulse),
GHC-ON (square Pulse),
GLC-OFF)
Expecting output of the above example is
GHA-OFF,
GLA-OFF,
GHB-OFF,
GLB-ON (square Pulse),
GHC-ON (square Pulse),
GLC-OFF
Kindly provide the solution fast, because we have very short time to complete the development.
Thanks,
Ramyaa R