


Hi,
This is related to a previous post about not being able to make a haptic actuator pass the calibration and diagnostic routine, the part number is G1040003D, you can find the datasheet in here. After running the calibration the DIAG_RESULT bit is not set.
Find below multiple screenshots with the actuator configuration I'm using and the oscilloscope capture of the output signals,OUT+ (Channel 2 - blue), OUT- (Channel 1 - yellow) and OUT+ - OUT- (purple), signals.
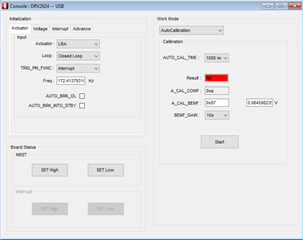
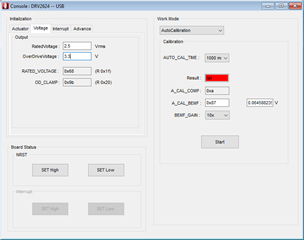
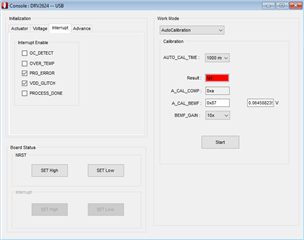
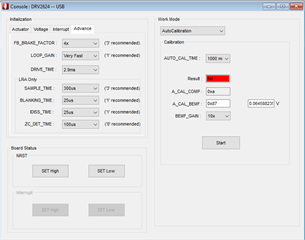
Output signals
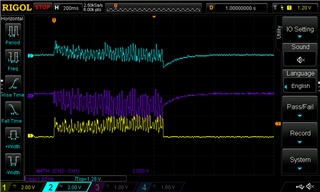
From the look of the output signals can we assume the actuator is not being properly driven? Most likely a configuration option is not setup correctly?
