- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hello,
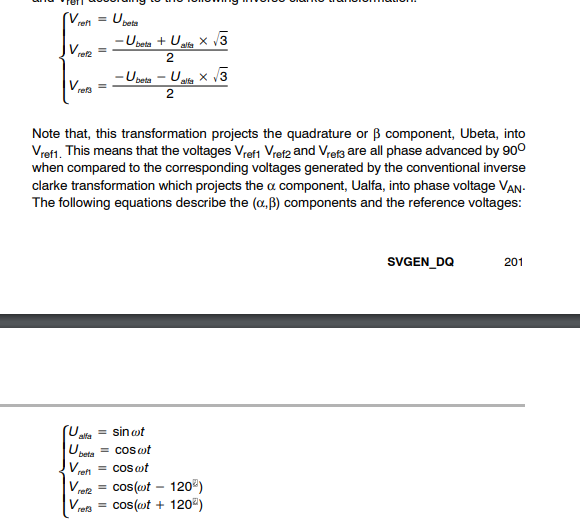
I have read spru485a (page 201) SVGEN_DQ part and I couldnt understand the idea below information. Because, according the below information when my phase A voltage is sin(wt), my reference voltage is cos(wt). Is there any specific reason why this transformation projects the quadrature or β component, Ubeta, into Vref1.
In other words if I apply the conventional inverse clarke transformation, is it problem for my motor control?