Other Parts Discussed in Thread: UCD3138, UCD3138064,
Hello,
I am using UCD3138ACCEVM149, ready to drive a LLC circuit.
I modified the demo program from trainingLab 3.
by changing the cpusample value, i can see the output PWM signal changing from 500KHz to 2MHz, that is working as I expect (PWM0 module).
while the problem is
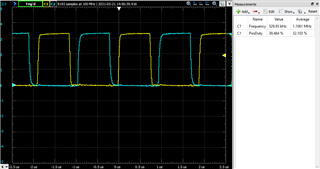
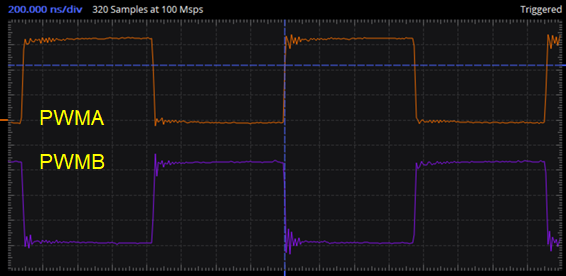
PWM0A pin is always good,
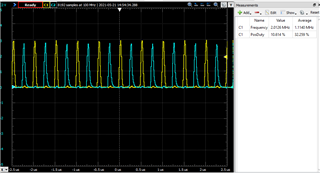
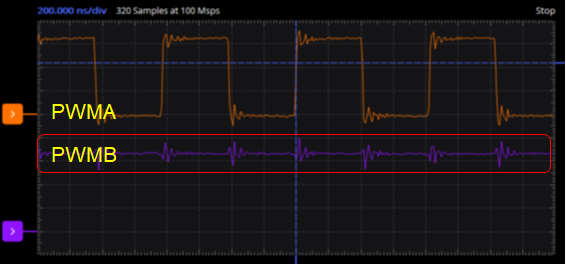
but the PWM0B sometimes is good, some times is HI level.
I mean during the frequency of 500kHz ~ 2MHz, Pwm0B is good at some frequency, but output HI level at some other frequency.
I am confused,
would you please give me some advices on what could be the reason of it?
thanks a lot!
Xioafeng Wu