Other Parts Discussed in Thread: BQ76952, BQSTUDIO
Hi all,
I am trying to communicate with the BQ76952 from the EVM board over SPI but have not been successful yet.
With the bq studio I activated all the necessary registers like it is descripted: REG12 = 0x0d, REG0 = 1, Comm Type = 0x0f, SPI Config = 0x60 (changing entries without writing to the device and then loading the configuration of the device again, confirms that the BQ has the correct configuration ...)
Then I disconnect the jumpers on J19 and J16 to disconnect from the onboard MCU.
And on J15 I put a jumper to activate the pull-up to the 3.3V on the MISO line.
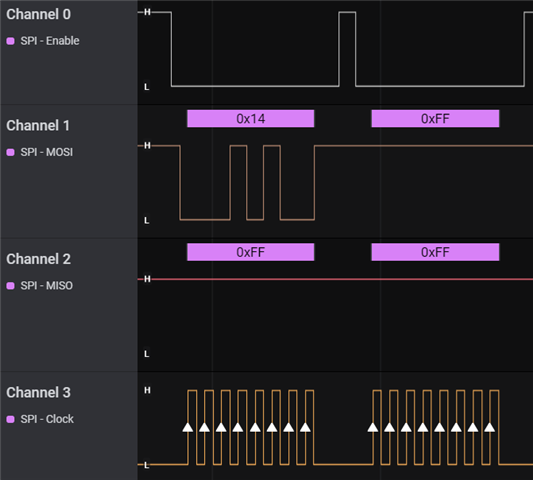
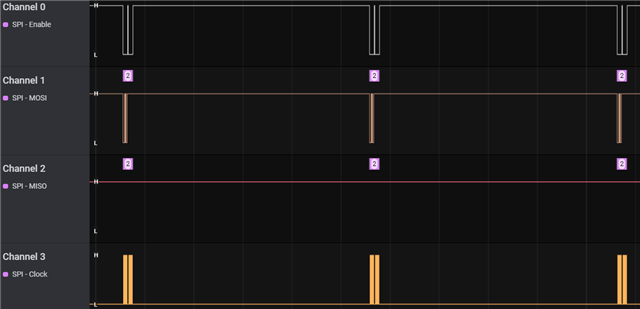
My programm from an external MCU writes two bytes on the MOSI line 0xE6 and 0x82, which I also crosscheck with an oscillsocope. (correct CS-line goes activ-low, correct CLK with 1MHz, and correct data)
But unfortunetly the BQ does not do anything. The MISO line stays high and it does not even return 0xff.
Do you have any idea what could be the issue? Did I forgot someting to configure or to activate?
Thanks for your support!
Best regards,
Martin