


Other Parts Discussed in Thread: BQ79616, MSP430FR5962, HALCOGEN, CODECOMPOSER
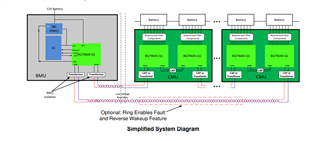
I tested a daisy chain of 3 custom BQ79616 MBBs connected to BQ79600 and MSP430 (SPI interface on custom PCB). One of the MBBs (device 2 in the middle of the daisy chain) has a damaged COMH interface from past ESD testing. When the stack of MBBs is connected to the BQ GUI ,the correct number of functioning stack devices is detected and the auto address sequence completes. The MSP430 firmware however, completes auto addressing only when the correctly functioning number of boards is provided. If the TOTALBOARDS includes the MBB with a damaged COMH interface, the MISO line has no activity, stays at 0xff. I am not aware of any missing register setup in the BQ79616. What can I do to troubleshoot this further-- I don’t have jumpers soldered to the COML lines of the MBBs.
Wakeup appears to complete correctly when the stack includes the MBB with damaged COMH interface. SPI_RDY goes active HIGH and then auto address is not proceeding.

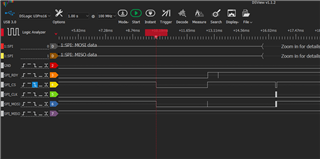
Attached is the screenshot when auto address completes successfully with TOTALBOARDS set to 3 (2 fully working MBBs).
