


We are working on BQ76952 IC. Thereby, we are facing an issue to communicate STM32 using I2C communication. Unfortunately, i can not establish communication. I use 0x10 or 0x11 (mention on datasheet) as I2C address of BQ76952, I don't get any response, not even any waveform (Observation over DSO). But when I mention any other address like 0x09 or likewise then DSO represent the waveform but it provide me NAC (negative acknowledgment or not acknowledged).
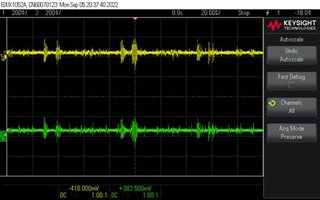
This is the waveform generated if we use 0x10 as I2C slave address (mentioned on datasheet)
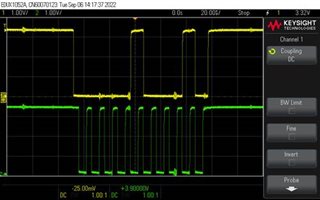
This is the waveform generated if we use any other address (I2C slave address)
What is the solution of this problem. Can anyone help me out?
We use the sample code provided by Ti as reference.

