Other Parts Discussed in Thread: BQSTUDIO, , EV2400
Tool/software:
Hello Team,
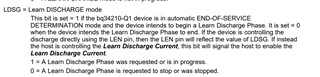
I have Started Learning cycle
But when I read the EOSLearnStatus() register continuously in loop I was able to see that LUCD and LFAULT flags are being raised.
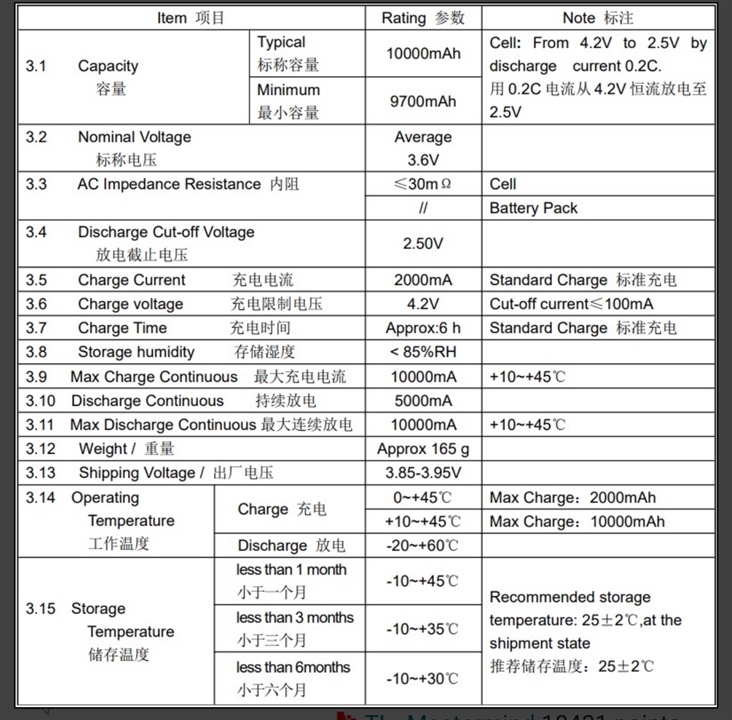
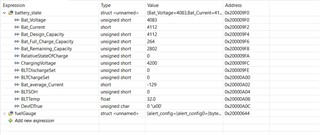
I have a battery of 10000mAh capacity
And Charging current is 2000mA
And Charging voltage is set to 4.2V
And Charge Detection threshold set for 500 and discharge detection threshold set for 200mA
Learn Discharge Current Set to 512mA and Learn Discharge Current Boundary set to 50%
We have charged the battery to full and we tried Discharge-Before-Charge learning method
Kindly let me know why LUCD and LFAULT flags are being asserted.
Thank you