


hi there,
I have a few questions for the design example (Figure 23) in http://www.ti.com/lit/ds/symlink/tps40322.pdf.
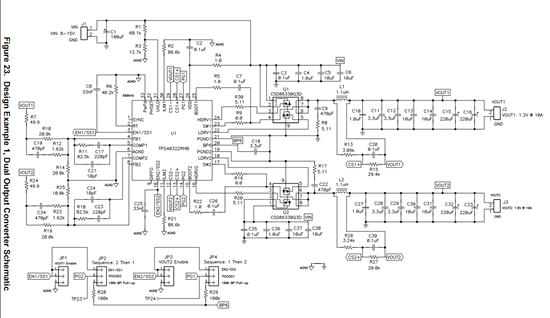
- What's the purpose of these 1 ohm resistors? R4=1ohm between VDD and VIN. R5=1.0R & R22=1.0R at the BOOTx pins.
thanks,
Titus
hi there,
I have a few questions for the design example (Figure 23) in http://www.ti.com/lit/ds/symlink/tps40322.pdf.
thanks,
Titus

