Other Parts Discussed in Thread: LM5137
Tool/software:
Hi TI technical Support Team,
Good day! we are an electronic engineering team and have some questions about TI multiple phase buck controller "LM25143".
According to the description in chapter 9.3.17.3 "Single-Output Multiphase Operation", LM25143 can support 6-phase or more for heavier loading driving.
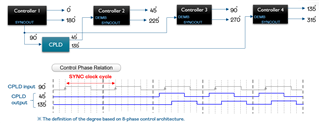
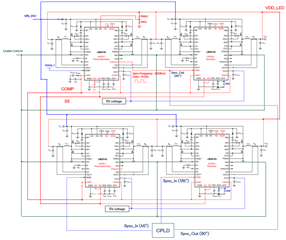
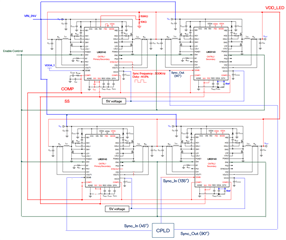
The figure is attached as below to show the connection of 8-phases control architecture we designed, 4 pcs of controllers are needed for our application case,
After our experiment, the activity of LM25143 is abnormal. there is not any MOSFET switching activity of each controller.
We guess there should be incorrect connection in our design.
We would like to know how to design 8-phase control or more phase control. ex : Hardware pin connection (FB, MODE, SS, COMP, DEMB, SYNCOUT, etc.)
If there is a figure to explain the connection method, it's better for us and If there is any other suggestion, please let us know as well.
Thanks a lot!