Tool/software:
Hello,
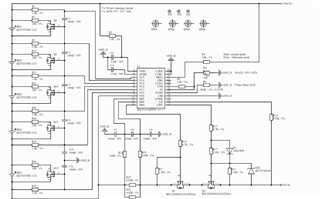
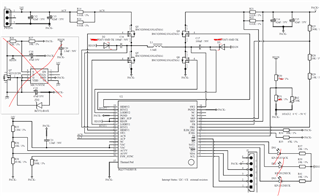
I have 5 cells in series using bq7791500 BMS I have tested separately that part with 2 A charging current and it works fine.
After connecting the charger i cant get more than 0.9A of charging current.
Input voltage 24V
Battery pack discharged to 18V