Tool/software:
Team,
Customer is designing the device driver for TPS25751 and wanted to check on how to handle failure modes. Here are the few scenarios I have identified so far:
- PBMs fail:
- For a !CMD error, is the driver expected to execute some sort of a reset like GO2P/Gaid/GAID? If not, can we expect to receive INT_EVENT1.ReadyForPatch after some sort of timeout?
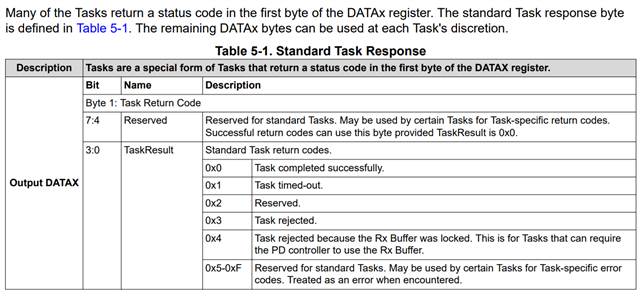
- CMD1 = 0 but DATAX returns an error. From the error codes on DATAX, it looks like the only recovery would be update the software. No runtime recovery is possible. *Can you confirm*?
- PBMc fail:
- For a !CMD error, it is expected to issue a PBMe. Again, can we expect to receive INT_EVENT1.ReadyForPatch after some sort of timeout?
- CMD1 = 0 but DATAX returns an error. From the error code in DevicePatchCompleteStatus, it looks like all errors except 0x20 (not ready) cannot be recovered runtime. *Can you confirm*?
- Other failures
- Let’s say patch bundle fails midway. What sort of signal can we use from the TPS to determine this has occurred?
Let me know if I might have missed something.
Regards,
Brian Antheunisse