I try use UCD3138 example Lab_4.
Success Buck converter close loop.
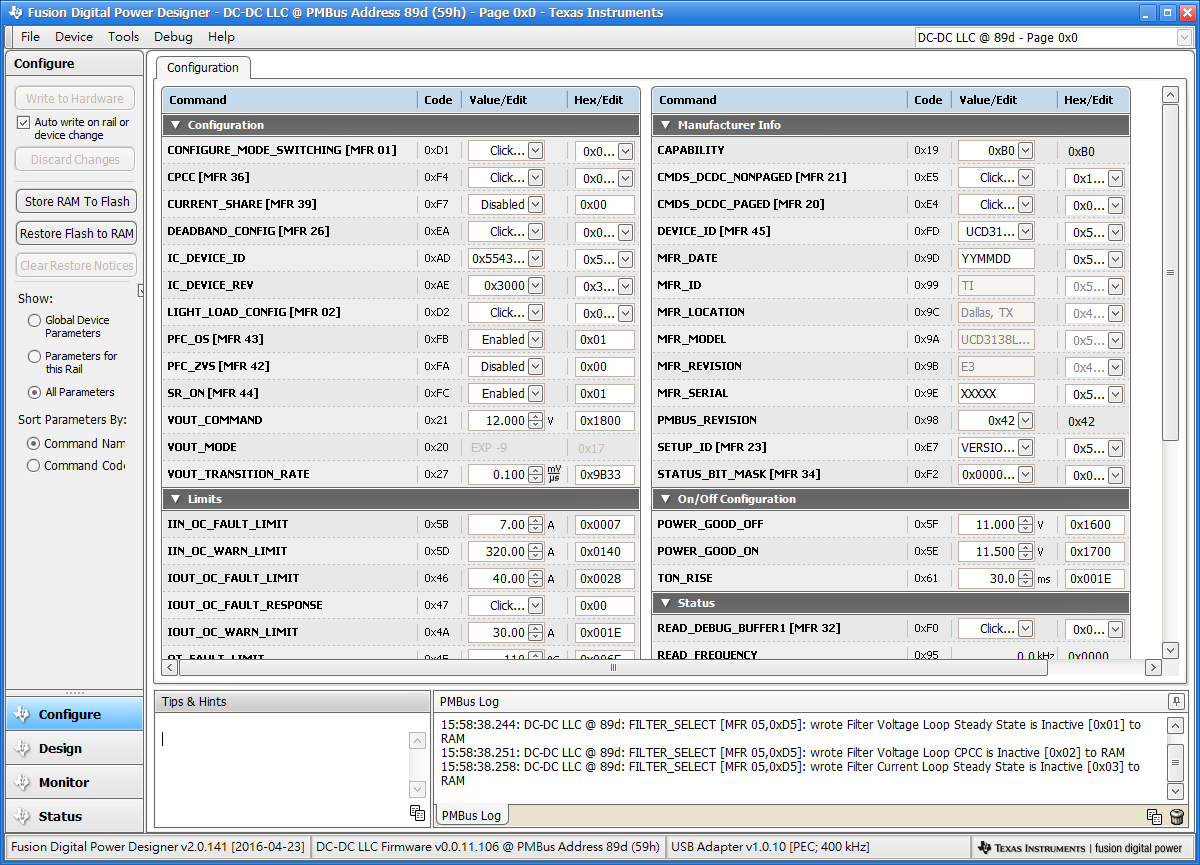
I some method change Lab_4 to LLC.
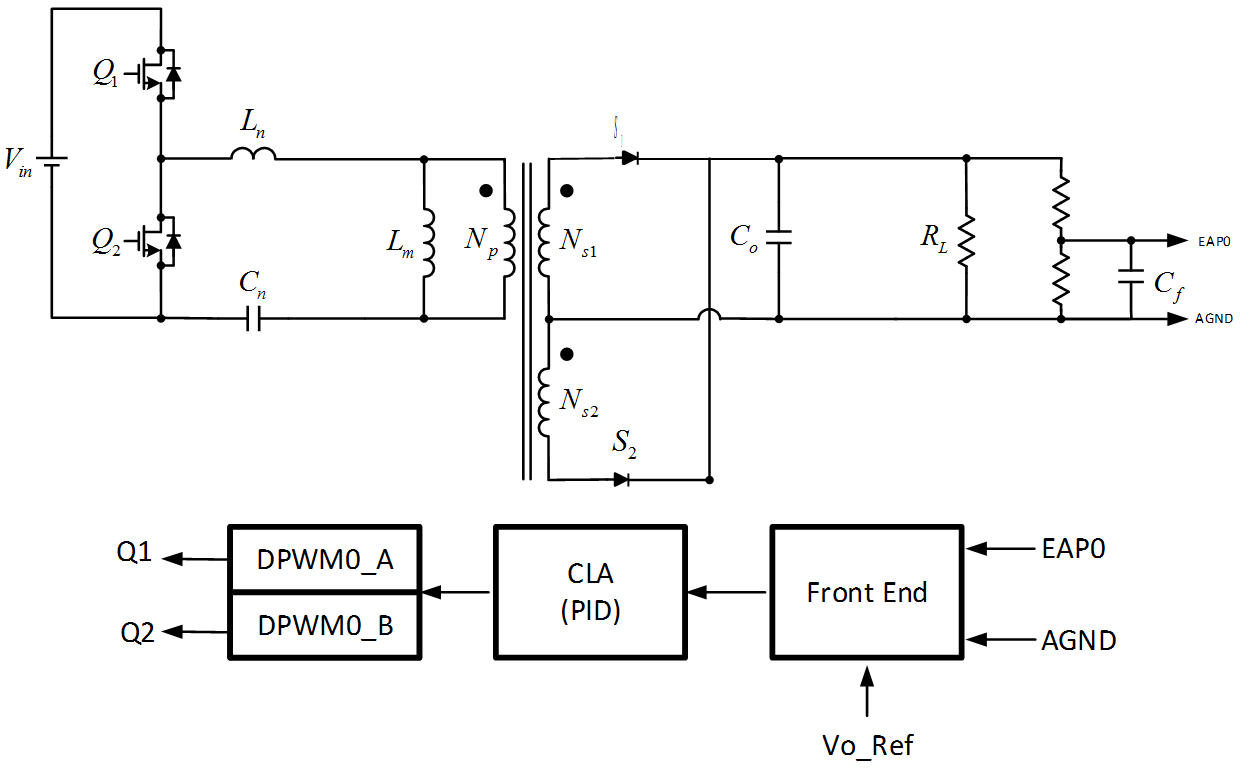
This is my LLC circuit:
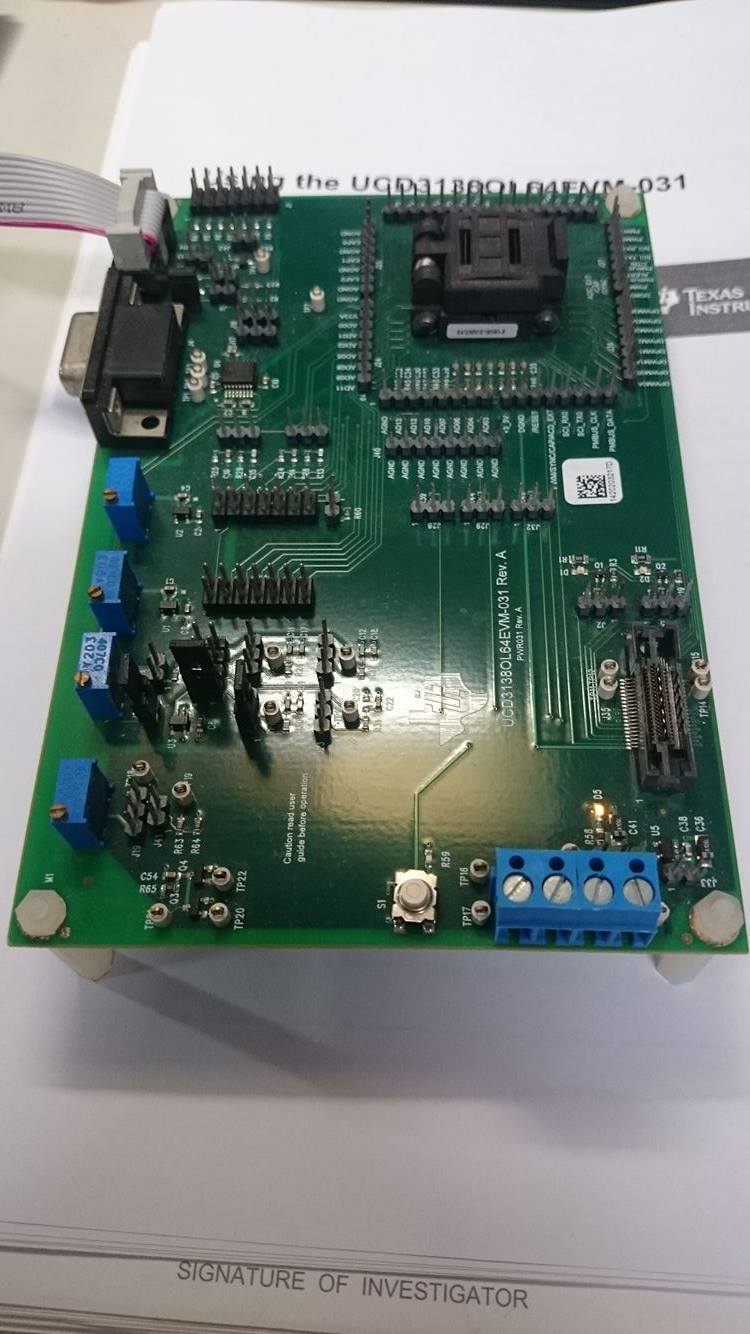
My UCD3138 platform is UCD3138OL64EVM-031 Rev.A
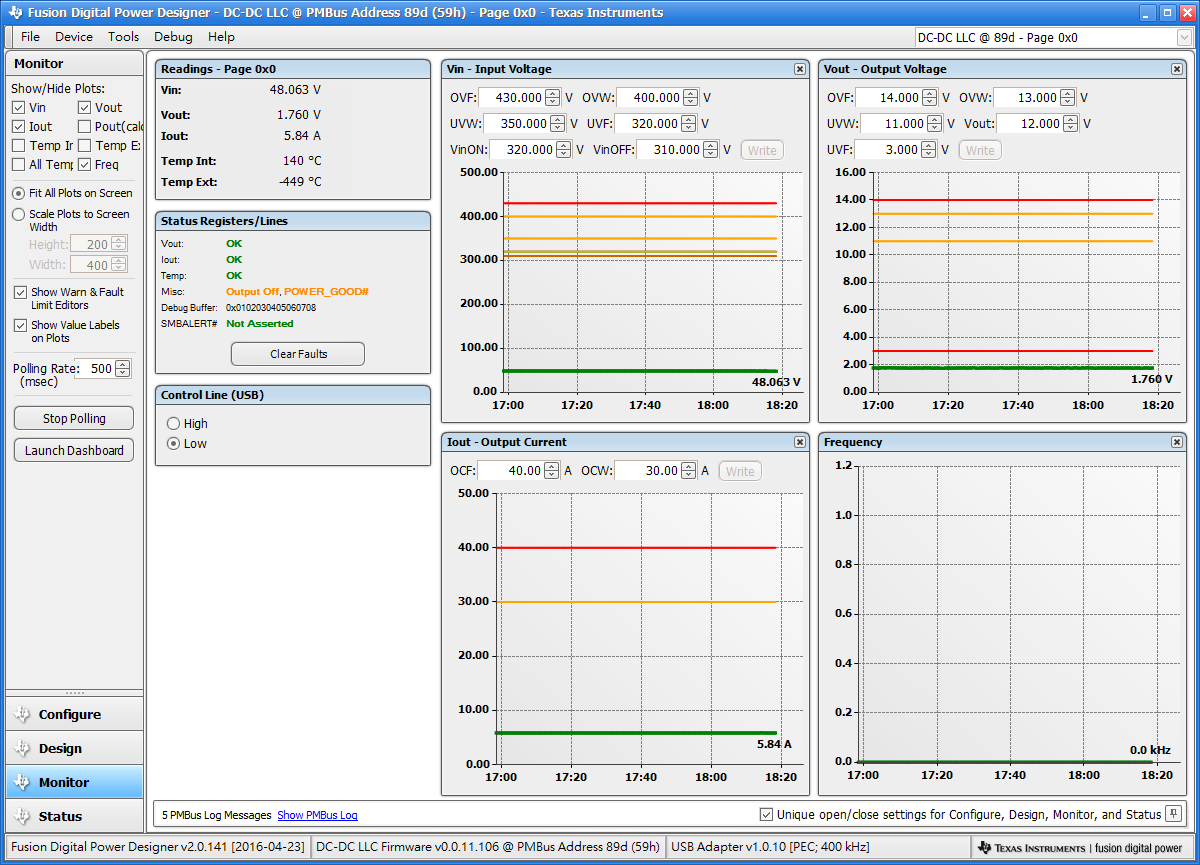
But not have any output from DPWM0_A and DPWM0_B
#define MAIN 1
#include "system_defines.h"
#include "Cyclone_Device.h"
#include "pmbus_commands.h"
#include "pmbus_common.h"
#include "pmbus_topology.h"
#include "variables.h"
#include "functions.h"
#include "software_interrupts.h"
#include "cyclone_defines.h"
#include "stdio.h"
void init_dpwm0(void)
{
Uint32 dead_time_1_local;
Uint32 dead_time_3_local;
Uint32 clamp_value;
dead_time_1_local = (pmbus_dcdc_config[0].dead_time_1 + 8) >> 4;
dead_time_3_local = (pmbus_dcdc_config[0].dead_time_3 + 8) >> 4;
clamp_value = (((Uint64)pmbus_dcdc_config[0].dead_time_2 * ((1 << 23) - 1)) / (pmbus_dcdc_config[0].max_period * 8));
Dpwm0Regs.DPWMCTRL0.bit.PWM_EN = 1; //1 = Enable PWM
Dpwm0Regs.DPWMCTRL0.bit.CLA_EN = 1; //1 = Enable CLA(PID)
Dpwm0Regs.DPWMCTRL0.bit.PWM_MODE = 1; //1 = Resonant Mode
Dpwm0Regs.DPWMCTRL0.bit.RESON_MODE_FIXED_DUTY_EN = 0; //0 = Duty cycle set by Filter duty
Dpwm0Regs.DPWMCTRL0.bit.CBC_ADV_CNT_EN = 0; //0 = PWM_A and PWM_B operate independently
Dpwm0Regs.DPWMCTRL1.bit.HIRES_DIS = 0; //0 = Enable High Resolution logic
Dpwm0Regs.DPWMCTRL1.bit.CHECK_OVERRIDE = 1; //1 = Disable //Bug
Dpwm0Regs.DPWMCTRL1.bit.EVENT_UP_SEL = 1; //1 = Update End Period Mode at End of Period
Dpwm0Regs.DPWMCTRL2.bit.RESON_DEADTIME_COMP_EN = 1; //1 = CLA Duty form Filter minus deadtime adjustment
Dpwm0Regs.DPWMCTRL2.bit.FILTER_DUTY_SEL = 2; //2 = DPWM Resonant Duty Register
Dpwm0Regs.DPWMPHASETRIG.bit.PHASE_TRIGGER = 2; //8ns phase delay
Dpwm0Regs.DPWMINT.bit.PRD_INT_SCALE = 2; //interrupt
Dpwm0Regs.DPWMINT.bit.PRD_INT_EN = 1; //interrupt
Dpwm0Regs.DPWMCTRL1.bit.GLOBAL_PERIOD_EN = 1; //1 = Event calculations use Global Period register
Dpwm0Regs.DPWMCTRL0.bit.MSYNC_SLAVE_EN = 0; //0 = PWM not synchronized to another PWM channel
LoopMuxRegs.DPWMMUX.bit.DPWM0_SYNC_SEL = 0; //0 = DPWM0 with DPWM0 Sync
Dpwm0Regs.DPWMPHASETRIG.all = 32; //128ns phase delay
Dpwm0Regs.DPWMEV1.bit.EVENT1 = dead_time_1_local;
Dpwm0Regs.DPWMEV2.bit.EVENT2 = pmbus_dcdc_config[0].min_period * 8 + dead_time_1_local * 16 - pmbus_dcdc_config[0].dead_time_2;
Dpwm0Regs.DPWMEV3.bit.EVENT3 = pmbus_dcdc_config[0].min_period * 8 + dead_time_1_local * 16;
Dpwm0Regs.DPWMEV4.bit.EVENT4 = pmbus_dcdc_config[0].min_period * 16 - pmbus_dcdc_config[0].dead_time_2 + dead_time_1_local * 16;
Dpwm0Regs.DPWMPRD.bit.PRD = pmbus_dcdc_config[0].min_period;
Dpwm0Regs.DPWMCYCADJA.bit.CYCLE_ADJUST_A = (int16)(-DEADTIME2);
Dpwm0Regs.DPWMCYCADJB.bit.CYCLE_ADJUST_B = (int16)(-DEADTIME2);
Dpwm0Regs.DPWMRESDUTY.bit.RESONANT_DUTY = (pmbus_dcdc_config[0].max_period + 1) >> 1;
Filter0Regs.FILTERYNCLPLO.all = clamp_value;
Filter1Regs.FILTERYNCLPLO.all = clamp_value;
LoopMuxRegs.FILTERKCOMPA.bit.KCOMP0 = pmbus_dcdc_config[0].max_period;
}
void init_filter0(void)
{
Filter0Regs.FILTERCTRL.bit.PERIOD_MULT_SEL = 1; //1 = KComp received from Loop Mux module
Filter0Regs.FILTERCTRL.bit.OUTPUT_MULT_SEL = 3; //3 = Resonant Duty value received from DPWM Module
Filter0Regs.FILTERCTRL.bit.FILTER_EN = 1; //1 = Enables Filter operation
Filter0Regs.FILTERCTRL.bit.OUTPUT_SCALE = 0; //0 = No shift
Filter0Regs.FILTERCTRL.bit.USE_CPU_SAMPLE = 0; //0= Filter Mode, input data received from EADC
Filter0Regs.FILTERKPCOEF0.bit.KP_COEF_0 = 1;
Filter0Regs.FILTERKICOEF0.bit.KI_COEF_0 = 1;
Filter0Regs.FILTERKDCOEF0.bit.KD_COEF_0 = 0;
Filter0Regs.FILTERKDALPHA.bit.KD_ALPHA_0 = -1;
Filter0Regs.FILTERKICLPHI.bit.KI_CLAMP_HIGH = 0x7FFFFF;
Filter0Regs.FILTERKICLPLO.bit.KI_CLAMP_LOW = 0;
Filter0Regs.FILTEROCLPHI.bit.OUTPUT_CLAMP_HIGH = 0x7FFFFF;
Filter0Regs.FILTEROCLPLO.bit.OUTPUT_CLAMP_LOW = 0;
//LoopMuxRegs.FILTERKCOMPA.bit.KCOMP0 = (PERIOD/2) >> 4; //KCOMP is at 4 ns, period is at 250 ps
}
void init_loop_mux(void)
{
LoopMuxRegs.FILTERMUX.bit.FILTER0_PER_SEL = 0; //0 = Filter0 form DPWM0
LoopMuxRegs.FILTERMUX.bit.FILTER0_KCOMP_SEL = 0; //0 = Filter0 form KCOMP0
LoopMuxRegs.DPWMMUX.bit.DPWM0_FILTER_SEL = 0; //0 = DPWM0 duty cycle(resonant period) from Filter0
LoopMuxRegs.DPWMMUX.bit.DPWM1_FILTER_SEL = 0; //0 = DPWM1 duty cycle(resonant period) from Filter0
LoopMuxRegs.DPWMMUX.bit.DPWM1_SYNC_SEL = 0; //0 = DPWM1 master sync with DPWM0 sync
LoopMuxRegs.FILTERMUX.bit.FILTER0_FE_SEL = 0; //0 = Filter0 form Front End0
LoopMuxRegs.LLENTHRESH.bit.CYCLE_CNT_THRESH = 0; //
//LoopMuxRegs.SAMPTRIGCTRL.bit.FE0_TRIG_DPWM0_EN = 1; //use DPWM0 for filter0 sample trigger
}
void global_enable(void) //P.188
{
LoopMuxRegs.GLBEN.all = 0x101;
}
void init_front_end0(void)
{
FeCtrl0Regs.EADCDAC.bit.DAC_VALUE = 0; //1bit=1.5625mV //range 0V~1.6V //Ref=0.8V
FeCtrl0Regs.EADCCTRL.bit.AFE_GAIN = 3; //
FeCtrl0Regs.EADCCTRL.bit.SCFE_CLK_DIV_2 = 0; //0 = 16MHz sampling
FeCtrl0Regs.EADCCTRL.bit.EADC_MODE = 0; //0 = Standard mode, EADC samples based on sample triggers from DPWM module
FeCtrl0Regs.EADCCTRL.bit.AVG_MODE_SEL = 2; //2 = 8x Averaging mode
FeCtrl0Regs.EADCCTRL.bit.AVG_SPATIAL_EN = 1; //
}
void main()
{
volatile unsigned int dummy;
if(GioRegs.FAULTIN.bit.FLT3_IN == 0)// Re-Check pin assignment (ADC_EXT/SYNC may be?)
{
clear_integrity_word();
}
MiscAnalogRegs.CLKTRIM.bit.HFO_LN_FILTER_EN = 0;
init_pmbus(0x58);
init_dpwm0();
init_filter0();
init_loop_mux();
init_front_end0();
global_enable();
for(;;)
{
pmbus_handler();
}
}
//#pragma INTERRUPT(c_int00,RESET)
void c_int00(void)
{
main();
}