Hi TI experts,
I used UCD3138OL64EVM to test PMBus write command with 100khz trans speed to microchip pickit serial analyzer,but I found that ACK's clock is not matched that I set 100khz trans speed,
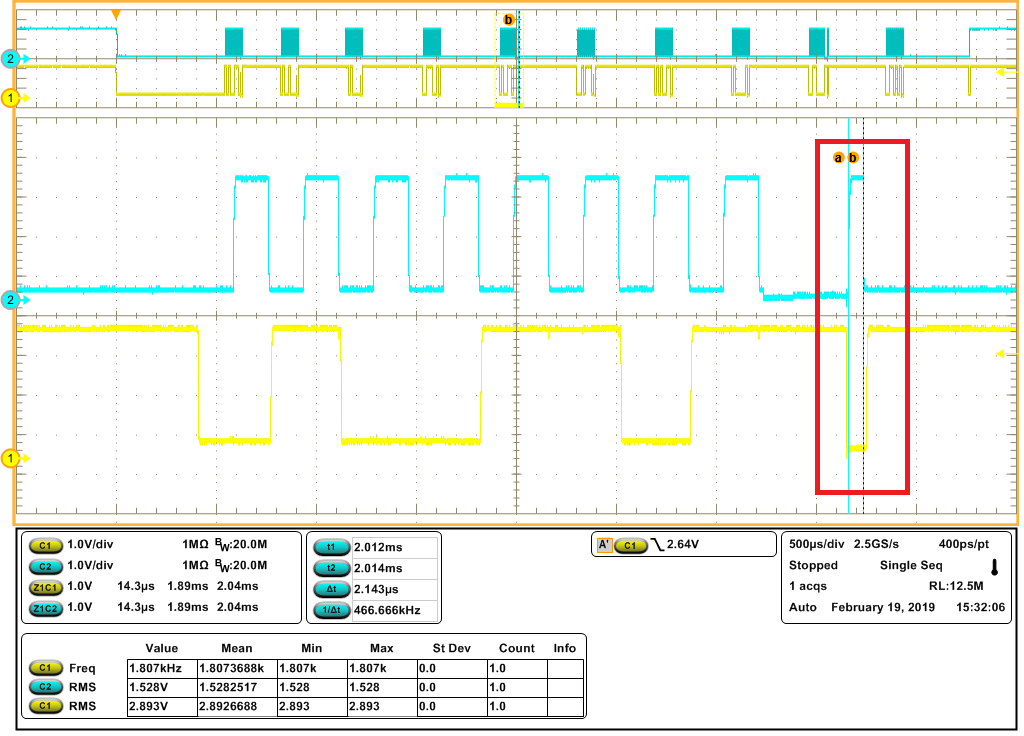
please see the waveform as below ,
ex: Write data [B6h][48h][D0h][39h][4Dh][2Eh][53h][41h][30h][35h] , did I miss something ? thanks.