


Hello,
I am trying to do communication between Charger IC(BQ25700A) and STM32 controller by using I2C communication protocol.For taking the status of charging/discharging current of battery from charger ic,i have to configure registers in charger ic as shown below: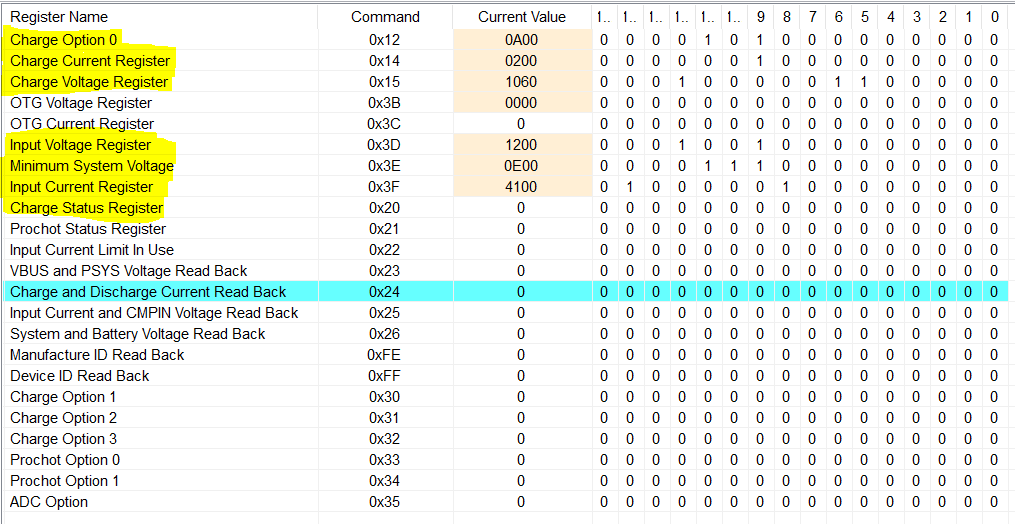
I have written C code according to given Read/write SMBus format in datasheet of charger ic but its not working. For loading current values in register address,i used array but i am unable to understand read/write SMBus format as shown below.if someone have example related to this,please share it.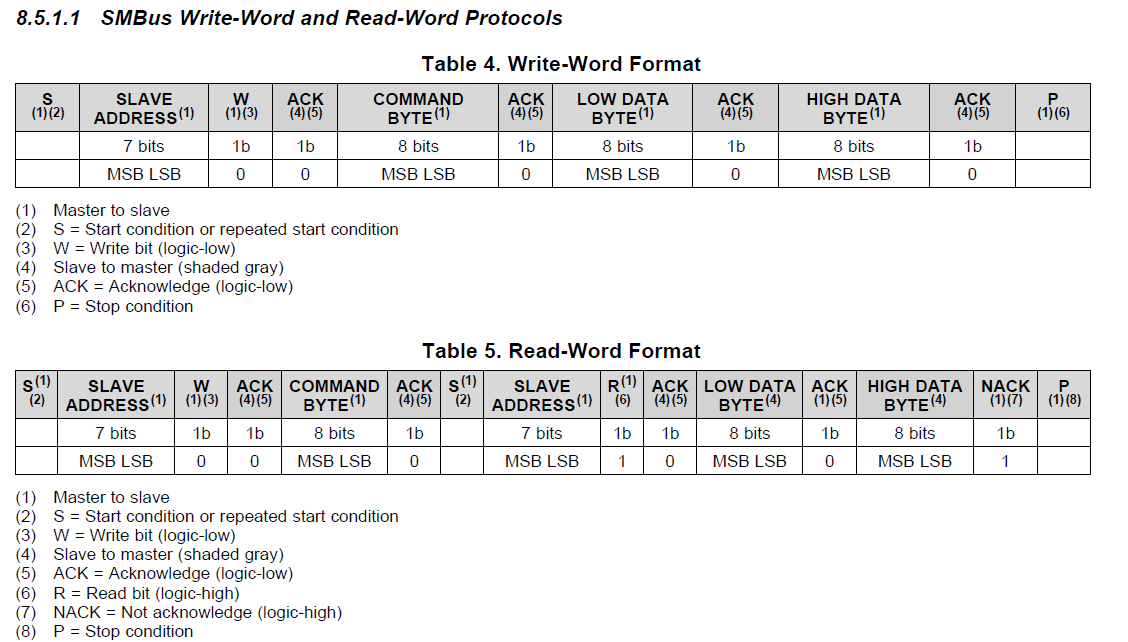
Datasheet of BQ25700A: http://www.ti.com/lit/ds/symlink/bq25700a.pdf
